Configure Now
Articulos en tu carro de compras0
0Articulos en tu carro de compras
Comienza a creando su paqueteCompra Ahora
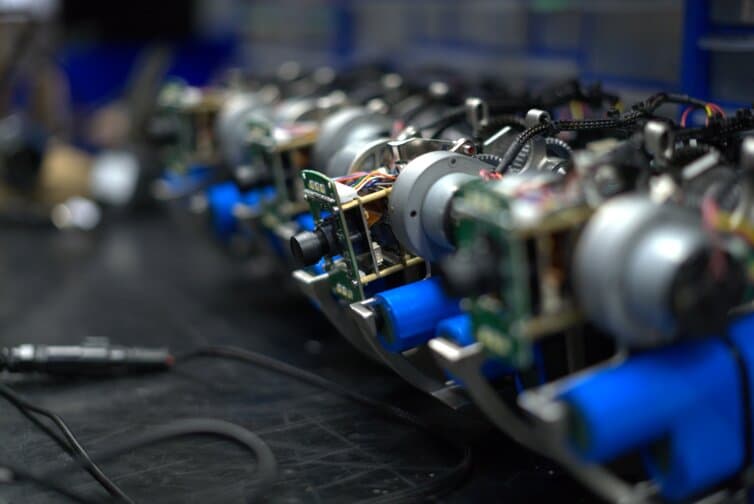
Obtenga más información sobre lo que implica la construcción de un potente Deep Trekker ROV Deep Trekker. Escuche al equipo de Deep Trekker sobre la importancia de la fabricación, los materiales y más.
El acoplamiento magnético ofrece una transferencia de par sin contacto mediante el uso de un campo magnético en lugar de una conexión física mecánica. El acoplamiento magnético ofrece a los pilotos de Deep Trekker un vehículo conveniente con poco mantenimiento. Como las dos superficies no se deslizan entre sí, no requieren reemplazos ni realineamientos. Además, existe una verdadera facilidad de mantenimiento, ya que los sistemas no requieren engrase, lubricación o recargas de gas nitrógeno. Quizás lo más importante es que los imanes no se desgastan con el tiempo, por lo que nuestros robots duran más que otros diseños, lo que le brinda un robot en el que puede confiar cada vez que lo llama para una misión.
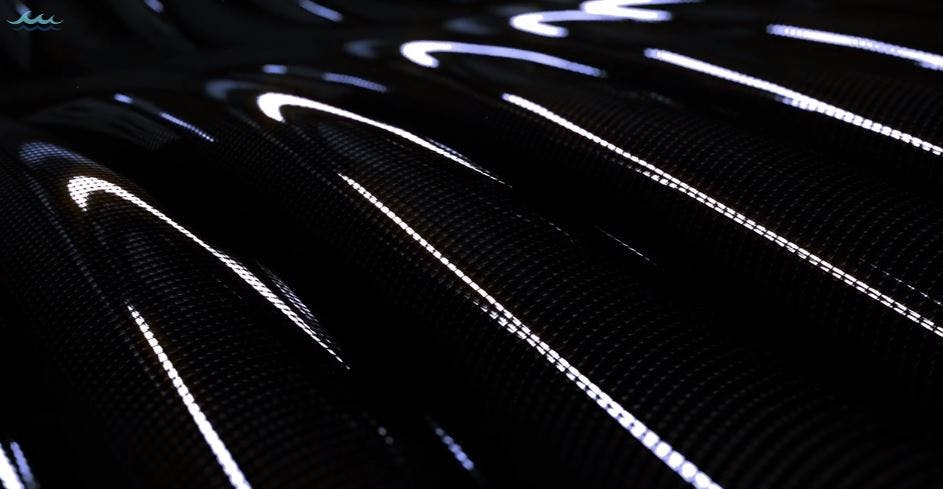
Los ROV sumergibles se pueden fabricar con una variedad de materiales como plástico, titanio, acero inoxidable y aluminio. Desde el transporte y la manipulación hasta las colisiones bajo el agua, un ROV tiene que soportar entornos difíciles. Los materiales del ROV también deben ser livianos para mantener una flotabilidad neutra para facilitar la navegación y un uso óptimo de la energía. Es imperativo que los ROV más pequeños, como los vehículos de Deep Trekker, tengan una flotabilidad neutra. Los metales y materiales más pesados hundirían el ROV, lo que dificultaría el trabajo para mantener la flotabilidad neutra y dificultaría la navegación. Con aluminio y fibra de carbono, los ROV Deep Trekker tienen una flotabilidad neutra por sí mismos, sin tener que desperdiciar la vida de la batería. Aunque son ligeros, el aluminio y la fibra de carbono son duraderos. Los ROV sumergibles se enfrentan a duras condiciones y realizan trabajos difíciles: el uso de aluminio y fibra de carbono logra un equilibrio entre ligereza y resistencia.
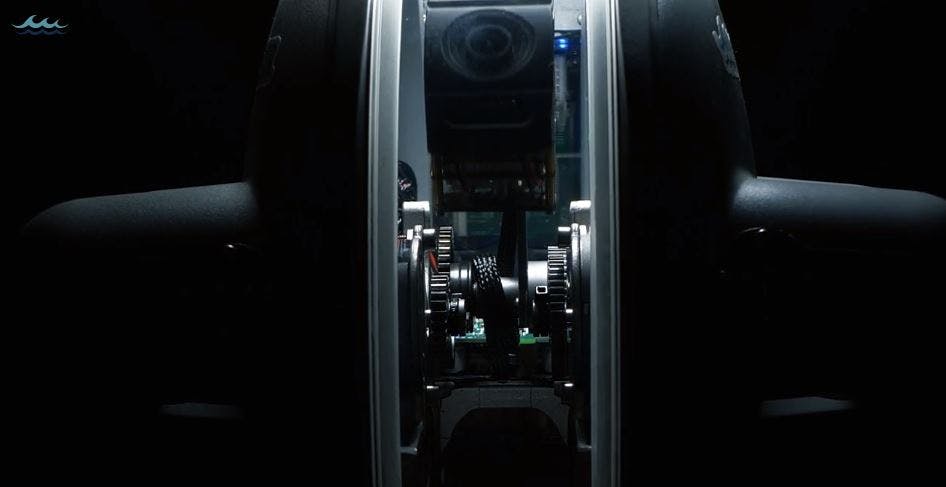
Hay muchos tipos diferentes de engranajes utilizados en sistemas robóticos. Los diferentes materiales de engranajes ofrecen numerosas ventajas y desventajas. Los radios de aleación de acero son duraderos, lo que es imperativo en la construcción de ROV. Particularmente útiles para sistemas de movimiento rápido, los engranajes de aleación de acero brindan al equipo de Deep Trekker la durabilidad y dureza requeridas para la construcción de ROV de primera categoría.
Mediante campos magnéticos, los sensores de efecto Hall se utilizan para detectar variables como la proximidad, la velocidad o el desplazamiento de un sistema mecánico. Los vehículos de Deep Trekker utilizan el efecto hall ya que su pequeño tamaño permite que los sensores se integren fácilmente en el vehículo para proporcionar información precisa.
La cubierta del lente de un ROV es crucial para el funcionamiento general del vehículo. Como un vehículo sumergible permite a los usuarios poner los ojos bajo el agua, una cubierta de lente eficaz es una necesidad absoluta. El acrílico y el zafiro son el material ideal para los vehículos Deep Trekker. Con el equilibrio perfecto entre claridad y durabilidad, nuestra cubierta de lente puede soportar los rigores del trabajo bajo el agua sin dejar de ofrecer una vista clara.
La latencia es un retraso desde la entrada de control hasta el robot que ejecuta el control. La latencia también puede referirse a un retraso desde la retroalimentación de la cámara o del sensor en el vehículo hasta la pantalla del control La latencia tiene impactos masivos en las operaciones de ROV. El control y la navegación se vuelven increíblemente difíciles, lo que hace que las tareas técnicas y precisas sean tediosas. La tecnología BRIDGE es un sistema operativo diseñado para crear una experiencia de latencia prácticamente nula. Los controles que dependen de la conexión bluetooth y / o wifi a un dispositivo móvil crean una latencia inherente que hace que el control sea difícil y frustrante. BRIDGE mejora las capacidades de operación con una plataforma de tecnología perfecta para todos los robots submarinos Deep Trekker. Los algoritmos avanzados permiten una respuesta perfecta entre el controlr y el vehículo, mientras que la plataforma de inteligencia mejorada tiene la capacidad de integrarse con integraciones de terceros actuales y futuras.
A medida que avanza el espacio de la tecnología submarina, con la disponibilidad de nuevos sensores y accesorios innovadores, se ha vuelto fundamental aprovechar las interfaces y protocolos de comunicación estandarizados y de uso común. Al utilizar las mismas interfaces que muchas integraciones y herramientas de terceros, la comunicación es fluida y sencilla. La tecnología BRIDGE de Deep Trekker fue una de las primeras en adoptar la topología de red IP, haciendo uso de la interfaz Ethernet establecida. Esta capacidad ha permitido la capacidad de integrar muchas tecnologías de vanguardia como sondas, DVL y cámaras.
El número de configuraciones de propulsores en un ROV es ilimitado, tanto en el recuento de propulsores como en la disposición del vehículo. Deep Trekker ha adoptado el enfoque de dos configuraciones principales, para adaptarse mejor a las diferentes necesidades de las aplicaciones del cliente. El DTG3 hace uso de solo dos propulsores y un mecanismo de cabeceo patentado. Esta configuración proporciona una plataforma magníficamente ágil, con el beneficio adicional de un factor de forma compacta y alta confiabilidad debido a menos partes móviles. La REVOLUTION se dirige a aplicaciones que requieren una plataforma muy estable, capaz de mejorar la maniobrabilidad. Para lograr esto, se adoptó una configuración de seis propulsores, lo que permite un control lateral total sin comprometer la estabilidad.