Configure Now
Articulos en tu carro de compras0
0Articulos en tu carro de compras
Comienza a creando su paqueteCompra Ahora
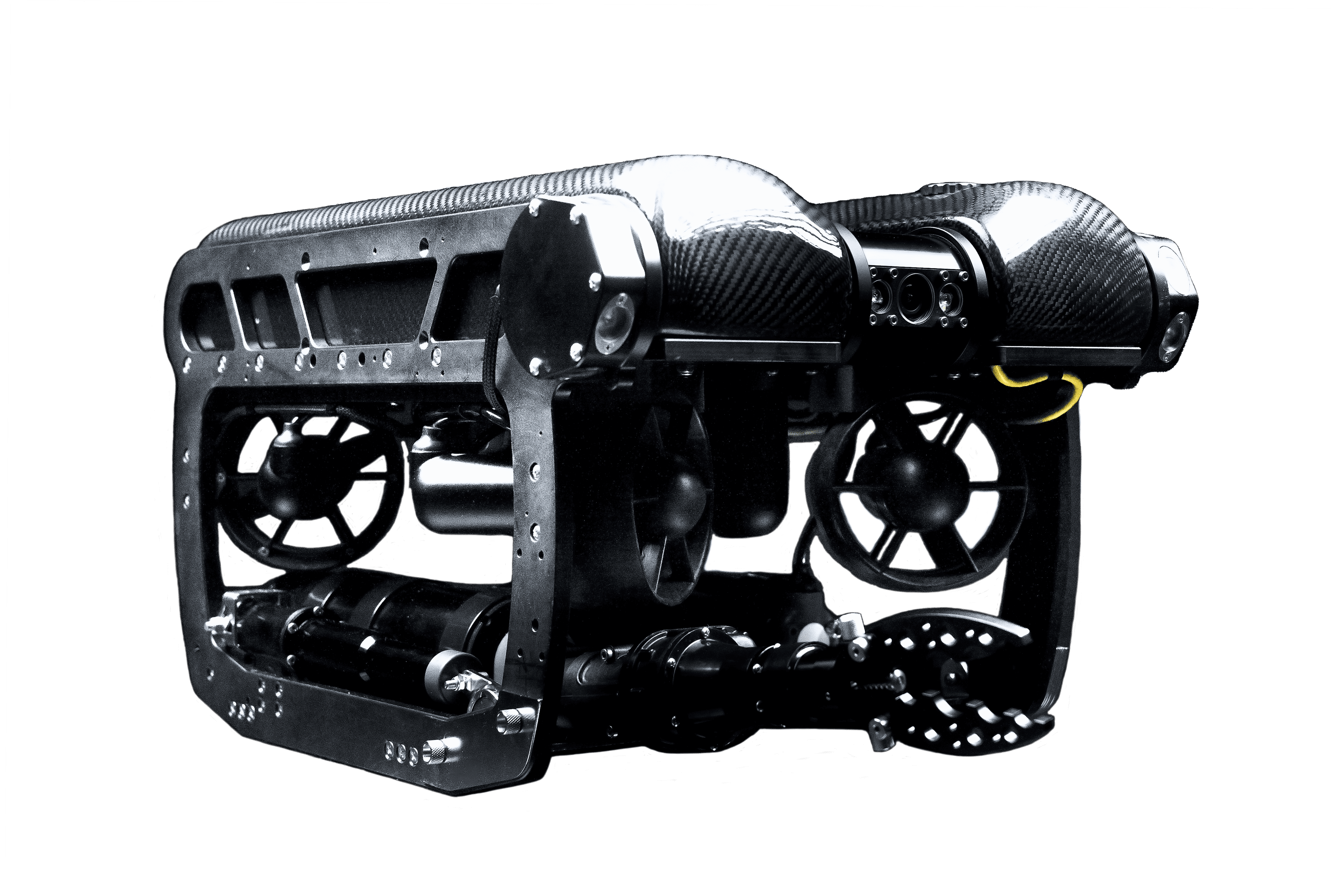
Customize your own ROV package
Elevate your search and recovery missions with Deep Trekker's precision location tracking and breadcrumbing capabilities. Our ROVs equip SAR teams with a powerful toolkit, allowing crews to seamlessly record crucial notes, capture high-quality photos and videos, and mark waypoints using Deep Trekker’s Mission Planner. This invaluable data not only ensures comprehensive documentation but also fosters a deeper understanding of each operation.
Elevate your search and recovery missions with Deep Trekker's precision location tracking and breadcrumbing capabilities. Our ROVs equip SAR teams with a powerful toolkit, allowing crews to seamlessly record crucial notes, capture high-quality photos and videos, and mark waypoints using Deep Trekker’s Mission Planner. This invaluable data not only ensures comprehensive documentation but also fosters a deeper understanding of each operation.
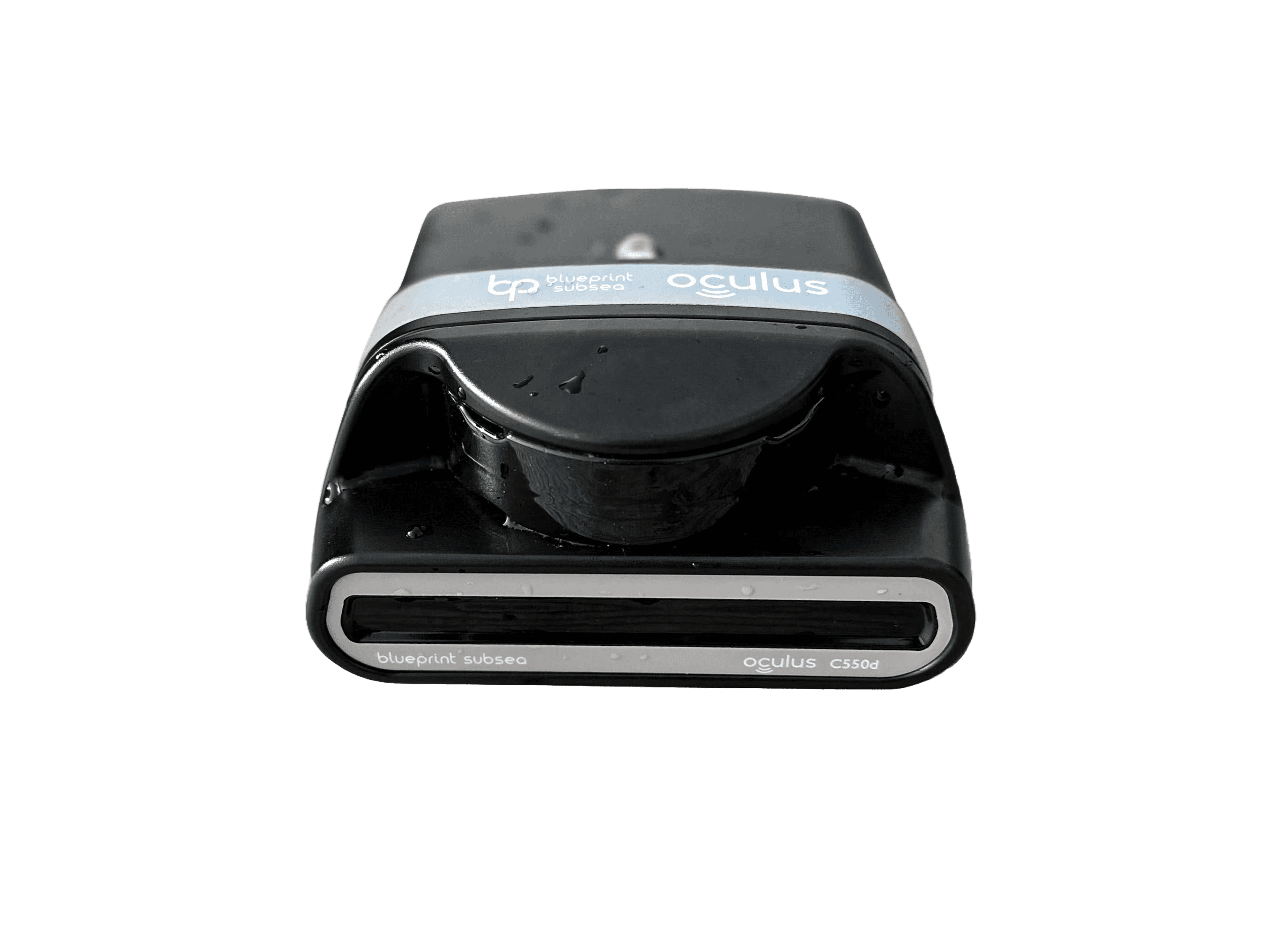
See through the murk during search missions with Deep Trekker's BRIDGE-enabled turbidity filters. Experience a wider field of view, enhanced clarity, and automatic color correction. The enhanced 4K camera delivers better visuals so your team can feel more confident that the areas have been searched properly.
See through the murk during search missions with Deep Trekker's BRIDGE-enabled turbidity filters. Experience a wider field of view, enhanced clarity, and automatic color correction. The enhanced 4K camera delivers better visuals so your team can feel more confident that the areas have been searched properly.

Need expert guidance on how to effectively utilize sonar in low visibility searches, or how to set up USBL positioning or DVL stabilization systems? Our technical training team can guide you through the basics of operating your Deep Trekker vehicle.
Need expert guidance on how to effectively utilize sonar in low visibility searches, or how to set up USBL positioning or DVL stabilization systems? Our technical training team can guide you through the basics of operating your Deep Trekker vehicle.















