Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
Search and recovery is the process of locating and retrieving a missing person when it has been determined that they are beyond rescue. Additionally, search and recovery includes the underwater retrieval of valuable objects, such as police evidence or overboard vessel equipment.
The difference between search and recovery and search and rescue is that search and rescue is the act of attempting to find a person (in a remote or difficult to access area, such as mountains, deserts, forests, lakes, or at sea) suspected to be in distress or impending danger, when there is a chance to save a life.
Search and recovery can occur in a variety of places, which include on-ground locations such as forests, deserts, or caves, as well as underwater locations such as lakes, rivers, or oceans.
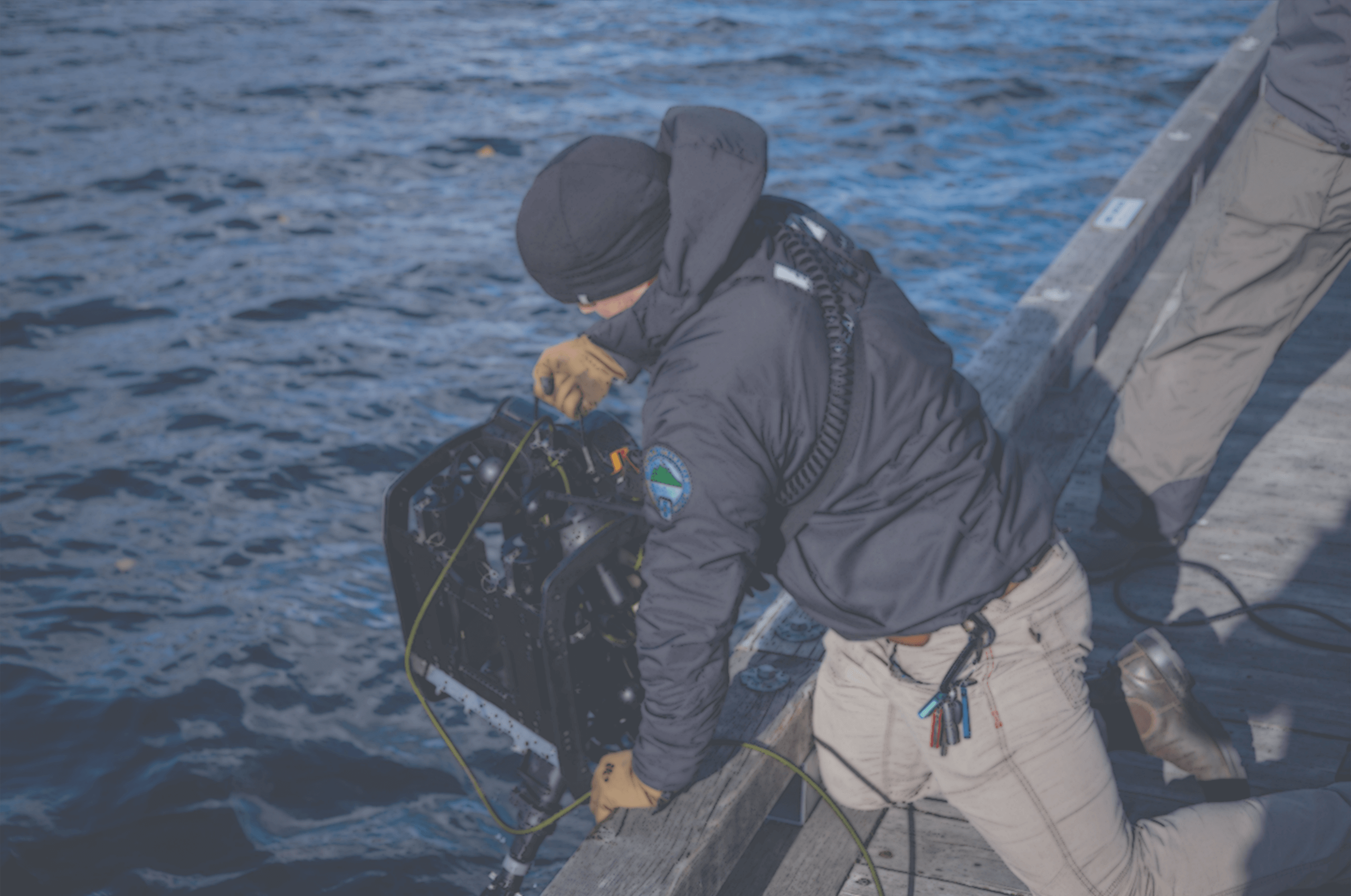
In underwater search and recovery, the goal is to find and retrieve the victim or object of interest as quickly as possible. Retrieval can be performed by divers or remotely operated vehicles (ROVs). Quite often the best result is a combination of both working in tandem.
Before a successful recovery can be carried out, a long, time-consuming, and often frustrating and dangerous search is conducted. Effective operations are dependent upon the combination of extensive training, capable equipment, and organized field planning.

The composition and size of search and recovery teams depend on several factors directly related to the mission at hand. The magnitude of the search area and the nature of the target significantly impact the type and number of personnel involved. Large-scale operations may require a larger team with specialized roles and equipment, while smaller missions could be managed by a more compact group.
Achieving successful outcomes in search and recovery operations necessitates rigorous and comprehensive training for all team members. Participants undergo extensive training programs to acquire essential skills and knowledge in various domains. These include mastering different search patterns and salvage techniques, as well as developing proficiency in navigation and communication strategies. By honing their abilities through training, search and recovery teams enhance their capacity to locate and recover individuals or objects of interest efficiently and effectively.
Search and recovery teams need to find their target in a quick and safe manner. Whether looking for a lost victim, vehicle, or other evidence, it is imperative that investigations be conducted as quickly and efficiently as possible.
Recovery teams typically plan their search area using the last known location and eye witness reports. Once the search area has been determined, search and rescue teams sweep the area looking for the target.

Whether using a side scan sonar on a boat or a sonar-equipped ROV, methodical search patterns are critical to the success of an underwater retrieval. There are many common patterns that search and recovery teams use to ensure that they are searching an area completely, without missing any key spots. Using a pattern allows the team to accurately track where they have and haven’t searched.
Once the target has been identified, recovery teams can safely and respectfully retrieve the victim or evidence. Using ROVs, rescue divers, or a combination of both, the team can complete the recovery.
The jackstay search method involves divers or ROVs swimming along a line known as the jackstay which serves as a guide. A jackstay is a line between two fixed points or anchors used to guide commercial divers to and from the underwater site, or to support the transport of materials and equipment to the location they are working in.
To conduct a search using the jackstay method, divers begin at one anchor and search along the line until they reach the second anchor. At that point the second anchor point is moved laterally to move the line. The distance the fixed point is moved depends on the underwater conditions, turbidity, and the size of the target.
Once the anchor is moved, the diver then switches directions and searches the area as they follow the line back to the initial anchor. This pattern continues until the area is completely searched.

The jackstay search method can be adapted based on specific circumstances. If the body of water being searched is relatively small or shallow, the jackstay can be moved by the surface team as opposed to the diver. By lifting the jackstay and moving the entire line parallel to the original position, the surface team can effectively move the line for the diver.
Another method, also known as the J search, involves the diver or ROV starting at the same end of the search line every time. Once the sweep of the line has been completed, the same end of the jackstay is reset every time so that by the end of the sweep, the line is parallel to its original position.
This method takes longer to complete; however, it is useful in extremely limited visibility or in cases where the target is very small, since the same area is searched twice as the diver or ROV swims back up the line.
A common search pattern is the circle search method. Relatively simple and straightforward, the circle search method consists of a diver or ROV swimming a series of circles, gradually increasing the circumference around a fixed reference point marking the centre of the search area.
Requiring minimal extra equipment, the circle search is best for searches where the area of the target is known with relative accuracy.
The centre of the search area should be clearly marked by a highly visible, fixed object. The radius of the circles depends strongly on visibility and underwater conditions. There should be a small overlap between the current circle and the previous circle to avoid the risk of missing the target.
If a diver is conducting the search, it is useful to attach a distance line to the fixed centre point, gradually unreeling sections of line at the conclusion of each circle. If ROVs are being employed, mission planning software can be utilized to place markers on the map and track which areas have been previously searched.
If the target is not found by the time the circle search has been completed, the team may shift the centre point and then start again.

The circle search method is similar to the spiral search method; however, the spiral search method is often completed without a central marking point. In lieu of the fixed point and line, distances are often measured using diver kicks or tracking distance covered on the ROV screen. While the spiral search method does not require a fixed point - and as a result is not susceptible to line tangling by underwater debris - it can be less accurate.
Another variation on the circle search method is the pendulum search, also known as the arc, or fishtail search. Often used when there is insufficient space to complete a full circle, the diver or ROV stops and changes direction at the end of each arc. This variation is often used when the search area is along a shoreline or dock where a full circle cannot be completed.
Another method to search large areas is using the bottom line search method. This method uses a team of 2-8 divers, who are dispersed along one rope.
The divers use the rope to travel together along the bottom of the water body. The distance that the divers are separated along the rope is contingent on the visibility underwater.

In this method, up to two divers or cameras can be towed behind a vessel at extremely slow speeds as they inspect the area. Divers are towed using a towboard, which allows them to steer underwater.
To begin a tow search, the vessel enters the area of interest and allows the diver to travel a safe distance from the boat. Once the diver has descended to the desired depth and signalled to the ship operator, the boat is slowly driven around a pre-planned path.
When the diver finds something of interest, a marker is used to identify it for a thorough search later. If the diver finds the target, they can retrieve it if it is safe enough to carry.
To keep divers safe, spotters are used and everyone is briefed on the search plan before entry into the water.
When this method is utilized, numbered grids are mapped onto the body of water. The size of the grids will depend on the target of interest. Once the water is divided, divers or an ROV is assigned to a grid that is marked by buoys. Within the grid, a detailed inspection is performed and any findings are reported after examination.
The grid method is hardly used in large area searches as it is a time-consuming process. It is usually employed when other methods have failed or there is a high likelihood of finding the target in a specific area.

This is the most common method when using a towfish or boat mounted side scan sonar. Side scan sonar works best when moving in straight lines. It is also best to overlap search lines as much as reasonably possible, at least 25-50%, to ensure that areas can be confidently “crossed off” as searched.
The boat operator will drive the straight line, turn around and return back to overlap with the last line as closely as possible, while the side scan monitor on the boat is looking for anomalies that could be the victim. Anomalies are marked by throwing a floating marker in the vicinity of the target for further evaluation by diver or by ROV later.
The radius search method is a variation of the grid search method. It is very similar to the grid search method; however, instead of a square grid, circles are used. Additionally, the radius search method is commonly employed in Arctic diving search recovery on water bodies with ice cover.
There are many common patterns that search teams use to ensure they are thoroughly searching an area. Learn about how underwater ROVs assist in the process.
Traditional search and recovery methods can present several challenges, such as safety, time, limited visibility, and cost - especially when dealing with large area search and recovery operations. Addressing these challenges requires innovation and the integration of modern technologies, such as:
By leveraging these technologies, search and recovery operations can be conducted more efficiently, safely, and with enhanced accuracy and speed.
Due to the volatility of the environments that underwater searches are conducted in, divers are faced with significant risks splashing into the depths of unknown waters.
Harsh weather conditions can severely impact the efforts of divers in an underwater large area search even more. Because these operations are so time sensitive, waiting out the weather isn’t always an option and teams are left to make difficult decisions to ensure the success of their mission and bring closure for families and loved ones of lost souls.
Divers are also subjected to limited oxygen and search times. Human divers have physical limitations, including endurance, depth limitations, and vulnerability to harmful conditions. Additionally, divers may face risks such as decompression sickness or cold water exposure. These limitations can restrict the scope and efficiency of large area search and recovery missions.

Time is a crucial factor in underwater search and recovery operations. Divers can only remain in the water for a limited time and require long rest periods and decompression time, which can dramatically slow down the underwater search and recovery process. Additionally, extensive time is typically needed to mobilize equipment and personnel to prepare for the mission.
Traditional search and recovery methods also involve meticulous and laborious manual searches, which can be time-consuming, especially in large areas. Search teams need to cover extensive areas, potentially resulting in delays in locating and recovering objects or individuals. Time is critical in underwater search and recovery operations, making the speed of traditional methods a significant challenge.
A substantial amount of personnel and resources are typically needed for traditional search methods, including:
This can be quite costly, and allocating resources and coordinating efforts can be challenging, especially in large-scale underwater search and recovery operations. Also, if teams don’t have sufficient resources, this can result in delays, redundancies, or inadequate coverage of the search area.
Hiring and scheduling divers is perhaps the most costly expense of traditional search methods. The cost of hiring the divers, equipment, and insurance can add up quickly, but can be mitigated by the use of ROVs to complement the divers and reduce their dive time, freeing up resources as well as making missions much more efficient. This is incredibly important in operations where time and speed are critical for success.
Certification and training of divers is also a cost to consider, especially when teams need to bring in volunteers that may not be specially trained to assist with the underwater retrieval. It’s also worth noting that scheduling divers can take time to coordinate, and in operations that are so time sensitive, this can be a barrier to the success of the mission, and will incur more operational costs, as support teams are required for longer periods of time while they wait for divers.

Operational costs can also include maintenance of equipment, requiring routine inspection, servicing, and repair of equipment to maintain their functionality. Additionally, equipment replacement or upgrades may be necessary over time, adding to the operational costs.
Unforeseen costs such as adverse weather conditions, changing environmental factors, or unexpected complications may also require additional resources, extended operation durations, or specialized expertise. Again, these costs can be potentially circumvented by the utilization of ROVs that are not affected by weather or environmental factors.
Traditional methods often face limitations due to restricted access and constraints, such as remote and difficult to reach locations, deep water, rugged terrain, or hazardous environments. In some cases, it may be impossible or unsafe for humans to reach certain areas, impeding the effectiveness of the underwater search and recovery efforts.
Poor visibility due to murky water, debris, or darkness can affect the ability of underwater search and recovery teams to locate and recover objects or individuals. Limited situational awareness can lead to missed targets, extended search times, or even safety risks for divers.
Limerick Marine Search and Rescue Service uses a Deep Trekker ROV to assist divers in their SAR operations. Tresurer, Mal Sherlock explains, “When we are diving we may miss something alongside us that might be only three feet away, whereas this drone is breaking down that barrier of misses.”
ROVs are designed to navigate through challenging terrains, including underwater environments, confined spaces, or areas with limited access for humans. They can reach areas that may be dangerous or inaccessible to divers and recovery teams, enhancing the scope and effectiveness of search and recovery operations.
The utilization of ROVs in large area recovery operations improves the efficiency of the mission in a variety of ways, including:
These benefits make ROVs valuable tools for effective and efficient recovery operations in various scenarios.
The utilization of ROVs in large area recovery operations significantly improves safety. The unpredictable and hazardous nature of the search and recovery environment, including cold temperatures, ice cover, wind, and strong currents can pose risks to divers. ROVs are incredibly useful, as they eliminate the need to send divers into dangerous conditions or unsafe areas.
However, when divers are needed, safety considerations must be addressed to ensure no additional loss of life occurs during the search. On top of diving in unknown and dangerous waters, these divers have limited oxygen tanks and search times.
Given these circumstances, ROVs can often be used prior to sending a diver, or in tandem, to monitor the safety of the diver. ROVs drastically improve safety for divers, as they can be used to assess conditions underwater and identify any hazards to a diver before they splash underwater.

ROVs equipped with Sonar and USBL Positioning Systems greatly enhance the locating abilities of search and recovery teams. Sonars are an extremely important tool for large area SAR teams, as the imaging sonar on ROVs can be utilized for the search effort, as well as identifying targets from side scan searches or diver searches.
In murky water scenarios, human eyes or high definition cameras are virtually useless to search an area. Sonar becomes a critical tool to improve locating abilities in these situations, especially in large area searches. Utilizing ROVs also allows search teams to conduct much more thorough searches at greater depths, where divers are unable to search.
ROVs are a more cost-effective solution to large area search and recovery efforts, as they are less expensive than divers. Dive equipment, insurance, and training are all substantial expenses that add up over time for organizations that typically need to squeeze the most out of funding.
ROVs provide a reliable ally for underwater search and recovery missions while keeping humans safely above the water. Divers make excellent ROV pilots, as well, since they have a feel and understanding of working in the types of environments being searched.
Search and recovery can occur in areas where it is difficult for a diver to enter. ROVs are highly portable, meaning they can be brought anywhere and function in almost any environment.
The long lasting batteries also mean there is no need for a generator on site. This gives flexibility needed in hard to reach locations.

In search and recovery, reducing the time spent on a mission is important as it brings peace of mind to victims' families quicker.
ROVs have quick deployment times, allowing users to have eyes below the water in under 30 seconds.
As well, ROVs can help complete a mission much faster, as they are able to withstand environmental conditions. Divers can slow down large search area times as environment conditions and oxygen levels can limit the time divers spend underwater, or increase the amount of breaks divers need.
ROVs can also be used to conduct preliminary searches, helping teams gain situational awareness that makes dives much safer and quicker, and at times, can even locate the object of interest before divers have even splashed, allowing them to simply follow the ROV tether to the target for a speedy recovery.
Having high quality images and video is important in large area search and recovery missions, as operators require a clear view of the water to identify their target.
ROVs provide clear imaging through LED lights and ultra HD live-camera feeds. In addition, ROVs are equipped with a camera that can rotate to various degrees, allowing users to view the underwater environment at different angles. When performing a recovery, having a clear picture of the target and where to close the grabber is essential.
Deep Trekker ROVs, including the, DTG3 ROV, PHOTON ROV, PIVOT ROV and REVOLUTION ROV, offer significant advantages in large area search and recovery missions. These ROVs can be rapidly deployed within seconds, without the need for topside power. Their portability and convenience, contained in Pelican cases, enable them to be easily transported and utilized from various watercraft, including small vessels like canoes. The versatility of Deep Trekker ROVs makes them valuable assets at any stage of underwater search and recovery operations.

Deep Trekker ROVs can be equipped with advanced features to enhance imaging and positioning capabilities. The integration of sonar imaging and USBL positioning systems allows for effective operation in murky or dark water conditions, significantly improving visibility and target identification. Additionally, the inclusion of DVL station holding technology enables stable maneuvering in strong currents, ensuring precise navigation during search and recovery efforts. These capabilities enhance the efficiency and accuracy of large area missions.
Deep Trekker ROVs provide underwater retrieval capabilities through the use of grabber claws. These claws can be utilized during the retrieval stage of search and recovery operations, enabling the secure and controlled retrieval of objects. The addition of grabber claws expands the versatility of Deep Trekker ROVs, allowing them to perform a wide range of tasks, including object recovery and relocation.
Deep Trekker ROVs have been successfully deployed in cold water environments, such as arctic diving search and recovery missions and Antarctic expeditions. In such operations, where dive times for human divers are limited, the industrial-grade engineered Deep Trekker ROVs serve as reliable and durable tools for extended search and recovery efforts. These ROVs are specifically designed to withstand and operate effectively in challenging environments, making them suitable for missions in extreme conditions.
Deep Trekker offers tailored solutions for search and recovery teams, accommodating different budgets and requirements. The experts at Deep Trekker can assist in identifying the most suitable technology for specific needs, ensuring optimal performance in large area missions.
Their industry expertise and guidance enable organizations to make informed decisions when incorporating ROVs into their search and recovery operations. Deep Trekker's team of professionals is readily available to answer any further questions and provide support throughout the process, facilitating a seamless integration of ROVs into existing workflows.
For organizations interested in acquiring their own Deep Trekker ROVs, a customized quote can be obtained to match specific requirements and budgetary considerations. Deep Trekker offers a range of technology options, allowing teams to select the most appropriate ROV for their needs. With access to Deep Trekker technology, search and recovery teams can enhance their capabilities, improve efficiency, and increase the success rate of large area missions.

March 17th, 2026
Two-day AIMS training program teaches SAR teams how to integrate sonar...
March 11th, 2026
Deep Trekker’s SPECTRA ROV integrates 3D Sonar SLAM, 4K stereo vision,...

November 3rd, 2025
At REPMUS 2025, Deep Trekker’s ROVs validated real-world mine countermeasure capabilities...