Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
Event Details:
Date: September 1-26, 2025
Location: Sesimbra & Troia, Portugal

This year’s REPMUS (Robotic Experimentation and Prototyping with Maritime Unmanned Systems) exercise in Portugal - the world’s premier event for maritime robotics and unmanned technologies - once again demonstrated the critical value of collaboration between industry and naval forces in advancing mine countermeasure (MCM) technologies.
For Deep Trekker, it was an opportunity not only to engage with Explosive Ordnance Disposal (EOD) teams from multiple nations but also to validate how our systems perform in real operational conditions - challenging seas, unpredictable weather, and demanding mission requirements.

If I had to summarize my main takeaway from REPMUS, it would be the confirmation that a remotely operated vehicle (ROV) can effectively re-acquire, identify, and classify a naval mine. On paper, it sounds straightforward - search an area, locate a contact, confirm its nature. In practice, mine warfare is often a “hunt of blind people.” You make assumptions, plan a route, deploy your assets, and sometimes find nothing.
But when you put an underwater drone on the bottom and start seeing real-time imagery and sonar feedback, that “blind” element disappears. You see the seabed. You see the mine. And when it happens, it’s impressive. During REPMUS, that capability wasn’t just theoretical - it was demonstrated repeatedly, proving that what we expect from our systems does, in fact, deliver operational results.
Learn all about underwater mines and explosive ordnance disposal, the risks involved, and how ROVs can help while providing extra safety and speed for divers.
One of the less glamorous but essential lessons was the importance of the platform that carries the ROV to the target area. You need a RHIB or a vessel to serve as your operational base. The better the vessel, the easier the mission.
Holding position is critical - either through anchoring or dynamic positioning (DP). Some teams even experimented with drifting operations, but that approach requires highly skilled operators to manage tether tension and orientation at all times. Looking ahead, automating this link - using an uncrewed surface vessel (USV) as the ferry - will be a significant step forward. In rough sea states, that autonomy could be the difference between completing a mission or aborting it.

Operating in the North Atlantic in September is not for the faint-hearted. Crews spent hours at sea, battling motion sickness, spray, and wind. It’s a reminder that hardware reliability and environmental resilience are not luxuries - they’re requirements. Equipment must remain fully operational after hours of exposure to saltwater, rain, and vibration. When a mission requires a long transit before deployment, you can’t afford a single point of failure due to corrosion or ingress.

Among the standout technology integrations at REPMUS was the ELWAVE electric field detection system, which was tested in combination with Deep Trekker’s REVOLUTION ROV. ELWAVE’s bio-inspired technology allows for passive detection of objects and targets based on their electric signatures, similar to how certain marine species sense their environment.
This integration represents a promising addition to the ROV toolkit. Traditional sonar and video remain the backbone of identification, but electric field sensing adds another layer of situational awareness - particularly useful in low-visibility or acoustically cluttered environments. While it’s still early days for operational deployment, the results at REPMUS suggest meaningful potential for future MCM systems combining underwater drone maneuverability, sonar imaging, and electric field detection in one platform.

Two additional integration trials during REPMUS 2025 produced practical and valuable insight into system compatibility and operational practicality: the Viper Mine Disposal System (MDS) integration and continued evaluation of the Voyis Discovery Stereo Camera on the REVOLUTION platform. Both represent key steps toward extending operational capability beyond traditional observation and classification roles.
Viper MDS Testing
The Viper MDS tests marked the beginning of a broader effort to validate ROV-based disposal capabilities. Trials were conducted using both the REVOLUTION and PIVOT platforms, confirming that the concept works - though refinements are still required before it can be considered operationally ready.
In mine warfare, operations are divided into four distinct phases:

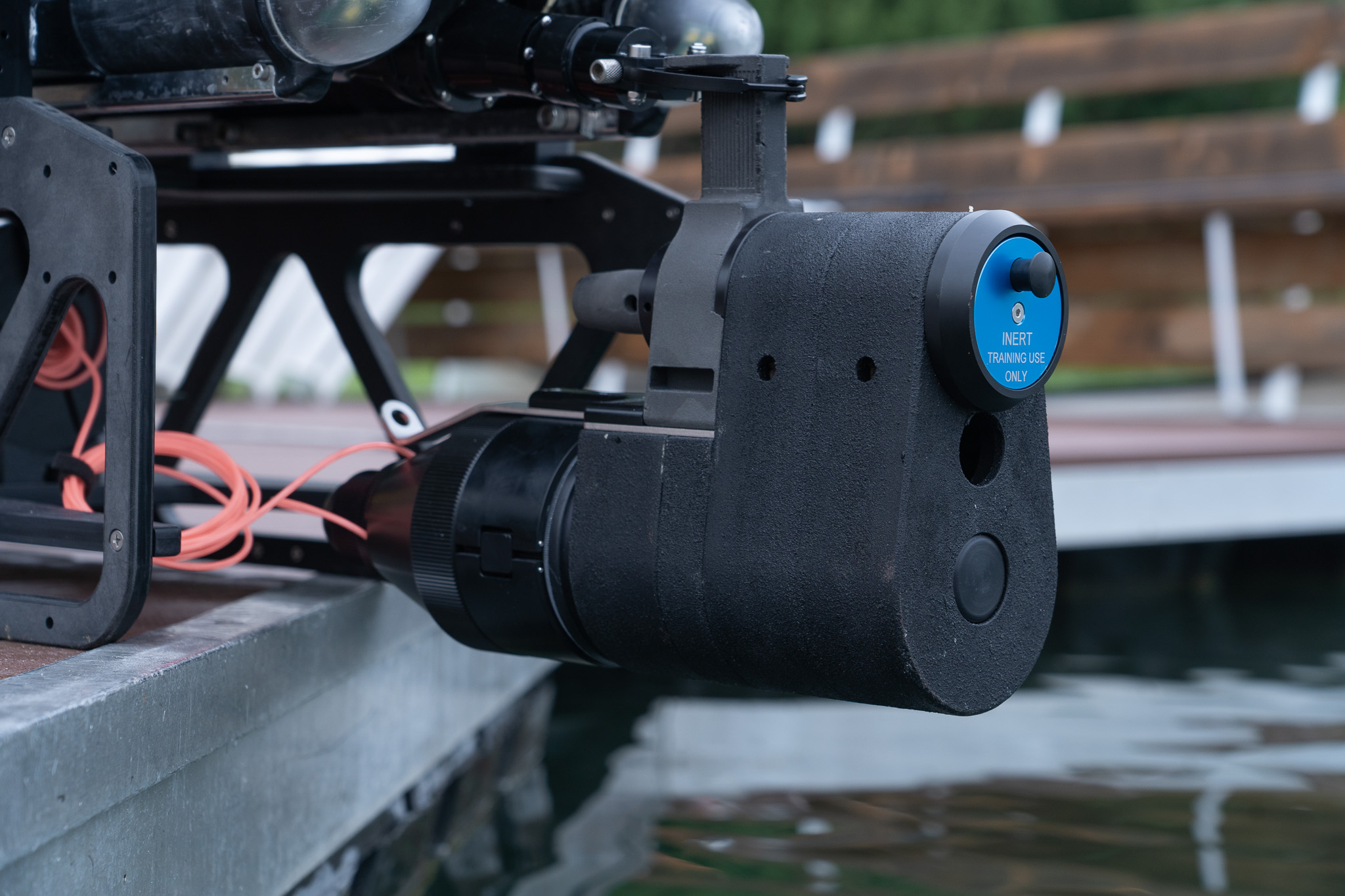
EOD diver operations carry inherent risk, while EMDS solutions such as the Exail K-Ster or Atlas SeaFox can be costly. The Viper MDS introduces an intermediate approach: an ROV-deliverable disruptor that offers a significant reduction in risk compared to diver operations, and at a fraction of the cost of EMDS systems. The Viper is a shaped charge fitted with a mechanical anchoring “nail gun,” enabling secure attachment to targets - typically seabed or moored mines. Importantly, it ships empty and is filled by EOD teams in the field, simplifying logistics, reducing regulatory restrictions, and improving deployment flexibility.

Key outcomes from the REPMUS tests:
The integration worked as a proof-of-concept, but requires refinement before full operational adoption. Tests showed reliable mounting and skid performance on REVOLUTION, yet the current grabber configuration proved unsuitable for reliable deployment. The PIVOT configuration, with a locked grabber, demonstrated improved stability under the same conditions.
Viper’s form factor and logistics profile reduce transport and regulatory complexity compared with fully charged or fully integrated EMDS packages, enabling faster shipment and simpler handling for partnered units and commercial teams. Industry implementations demonstrate the Viper concept fitted to purpose-built ROVs.

Voyis Discovery Stereo Camera Testing
The Voyis team joined REPMUS to demonstrate the Discovery Stereo Camera’s integration with Deep Trekker’s REVOLUTION ROV. The system captured high-resolution 3D optical datasets suitable for photogrammetric products and digital-twin generation.

In a mine countermeasure context, stereo photogrammetry supports precise measurement of contacts and improved situational awareness for classification and identification. Equally important, this capability translates directly to persistent infrastructure monitoring: a bottom-resident or fixed-structure launchable stereo node can perform routine inspections of harbours, piers, and strategic fixed assets - flagging unplanned objects (for example, suspicious attachments or limpet devices) and creating up-to-date digital twins for forensic comparison. These workflows augment sonar and video rather than replace them, improving confidence in decision-making at the point of contact.

Beyond MCM, the same technology is applicable to persistent monitoring of strategic underwater infrastructure. A stereo imaging system can be installed as a bottom-resident or fixed-structure unit to perform routine inspections of harbours, piers, and subsea installations - detecting unauthorized objects or anomalies that may indicate tampering or threats. This dual-use potential makes the system well-suited for both defense and infrastructure protection, providing continuous situational awareness through automated 3D reconstructions.
Working alongside the Royal Canadian Navy and other NATO participants, the test confirmed the compatibility of the Discovery Stereo with the REVOLUTION’s payload and control systems. The integration provided detailed optical measurements suitable for digital twin generation and mission planning - validating how compact ROVs can contribute to multi-sensor data fusion in complex subsea environments.

It’s fair to say that autonomous underwater vehicles (AUVs) continue to be viewed as the “future” of mine warfare. However, the reality - observed firsthand again this year - is that AUVs are not the silver bullet many hoped for. Despite the millions invested globally, they remain only partially effective, often providing limited or low-definition data and still missing targets. That’s not criticism, just a reflection of current technology maturity.
For now, the present belongs to ROVs and USVs. They offer real-time decision-making, immediate visual confirmation, and the flexibility to adapt mid-mission. Autonomy is coming, but until systems can combine reliability with precision, the human-in-the-loop remains indispensable.

One of the most engaging parts of our presence at REPMUS was organizing the Deep Trekker Challenge - a friendly competition designed to let EOD teams from various nations experience operating the REVOLUTION ROV firsthand.
The challenge involved a re-acquisition and identification mission, tasking teams to locate and classify three to four MILCO (Mine-Like Contacts) targets within a defined area. Each team was evaluated across ten criteria - from pre-mission planning and system preparation to sensor utilization, communication, problem-solving, safety, and post-mission analysis.
Teams such as Marine Nationale (France), Belgian Navy, Bundes Marine (German Navy), and Marinha Portuguesa (Portugal) demonstrated excellent coordination, technical proficiency, and adaptability in real conditions, achieving top scores across most evaluation categories. Their ability to operate efficiently, manage resources, and make quick tactical adjustments under pressure stood out.
The event wasn’t just about competition - it was about knowledge exchange. Teams unfamiliar with the Deep Trekker system were able to learn operational procedures, interface with sonar data, and adapt to the compact ROV’s handling within minutes. That accessibility is one of our greatest strengths: a professional-grade system that’s intuitive even for first-time users.
At the end of the challenge, scores were reviewed in collaboration with the Mine Warfare Working Group and CTU (Commander Task Unit) leadership, with the winning team recognized during a ceremony on Media Day (23 September). Deep Trekker’s President, Alan Middup, presented the award, followed by an informal dinner with the winning crew - a well-deserved moment of celebration after days of demanding fieldwork.

REPMUS reinforced a few key principles that apply to everyone working in mine countermeasures:
Reliability over complexity: It’s better to have a simple system that works every time than an advanced one that fails after an hour of use.
System integration matters: The connection between USV, ROV, and operator workflow determines mission success more than any single sensor.
Environmental resilience is non-negotiable: Hardware that can’t endure real sea conditions will never deliver consistent results.

For Deep Trekker, REPMUS 2025 was both a validation and a learning experience. The integration of ELWAVE marked a technical milestone, and the Deep Trekker Challenge fostered valuable engagement across allied EOD units.
If there’s one takeaway for future operations, it’s that USV–ROV collaboration represents the most immediate and practical advancement for mine warfare. Combining real-time control, autonomy, and robustness in harsh conditions will define the next generation of MCM systems - and we’re ready to build toward that future.
For product and training information, visit the Deep Trekker website or get in touch with one of our specialists.


March 17th, 2026
Two-day AIMS training program teaches SAR teams how to integrate sonar...
March 11th, 2026
Deep Trekker’s SPECTRA ROV integrates 3D Sonar SLAM, 4K stereo vision,...

November 3rd, 2025
At REPMUS 2025, Deep Trekker’s ROVs validated real-world mine countermeasure capabilities...