Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
London, UK | March 10, 2026 - Today at 15:00 at the historic dockside during Oceanology International, Deep Trekker officially unveils the next evolution in subsea robotics: SPECTRA, the company’s next-generation ROV. SPECTRA is a deep-rated inspection and survey ROV, engineered to set a new benchmark in underwater inspections. Designed for deep water, high-current operations, precision station holding, real-time 3D sonar SLAM, and integrated 4K stereo vision, SPECTRA introduces a new performance class of portable ROV. This is more than a new ROV - it’s a new standard in underwater technology.
“SPECTRA brings completely new capabilities to Deep Trekker, enabling us to push the boundaries of what can be achieved with our portable ROVs - something we have been known for since our beginnings.” Deep Trekker President, Alan Middup remarks. “We have taken a ground-up engineering approach, factoring in the broad experience we have built up from over a decade of developing subsea robotic systems. That makes SPECTRA the first in a new generation of ROV technology, one that we are incredibly excited to be launching!”

Deep Trekker designed SPECTRA to maintain the familiar operator experience of its previous-generation platforms while significantly increasing performance capacity.
Operators receive:
All without adding operational complexity or requiring specialized topside hardware. The vehicle maintains intuitive piloting characteristics, tuned for smooth low-speed modulation and stable station-keeping with minimal input.
SPECTRA is rated to 1,000 meters and developed around defined current-handling targets. Its seven-thruster propulsion system uses a symmetrical layout to improve positional control in cross-current environments. The vehicle can hold position in currents up to 3 knots from any direction and reach forward speeds exceeding 4 knots. Lateral movement speeds are measured at two to three times faster than many platforms in the same size category.

As Cody Warner, Commercial Vice President, explains, “The biggest thing for a vehicle of this size is the ability to operate effectively in strong currents. It's going to be deployed into some really tough environments. So, you need something that's going to be able to not only move fast forwards, but also hold up in current from all directions. So, lateral movement is key here.”
Engineering effort focused not only on peak thrust output but also on precise low-speed modulation. Close-proximity inspection of risers, jackets, hulls, and splash-zone assets requires incremental control rather than aggressive thrust. The final control tuning enables stable station-keeping with minimal drift, even in variable surface-driven currents.
Unlike forward-biased thrust layouts common in similarly sized vehicles, SPECTRA’s steeper thruster vector angles and balanced distribution deliver powerful lateral movement relative to drag. The result is precise positional control in cross-current environments such as splash zones, offshore structures, and dynamic surface conditions.
Despite its power envelope, the vehicle remains hand-deployable, offering significantly reduced deployment complexity relative to typical work-class ROVs with comparable capabilities.
Spatial awareness remains one of the primary limitations in subsea ROV operations. Even with external positioning systems, operators often lack actionable environmental context during inspection tasks.
SPECTRA incorporates real-time point cloud generation from Sonar Simultaneous Localization & Mapping (SLAM), enabling continuous 3D interpretation of the surrounding environment - even in high turbidity or low-visibility water. By fusing sonar data with onboard sensor inputs, the system continuously estimates relative position and orientation while building a live spatial model of the work area.

This directly supports more effective inspections. Operators can visualize asset geometry in three dimensions, verify coverage in real time, and identify missed areas before demobilization. The point cloud provides structural context beyond a single camera view, improving target reacquisition, alignment for measurement, and repeatability of inspection paths over time. In GNSS-denied or acoustically complex environments, this reduces navigation uncertainty and increases success of data completeness.
All SLAM processing occurs onboard the vehicle, eliminating the need for high-performance external topside computers. Operators can run the control application on a standard PC while receiving continuous 3D spatial feedback, maintaining portability without sacrificing inspection capability.
Chad Plesa-Naden, Engineering Director, discusses these exciting new features set to disrupt the market: “Bringing high-capability, scaled photogrammetry into an integrated and highly maneuverable platform is unmatched in the market today. Combined with the perception capabilities of Sonar SLAM integrated with onboard computing - which eliminates the need for bulky topside computers - this creates a highly sophisticated sensor payload in a fully portable package.”
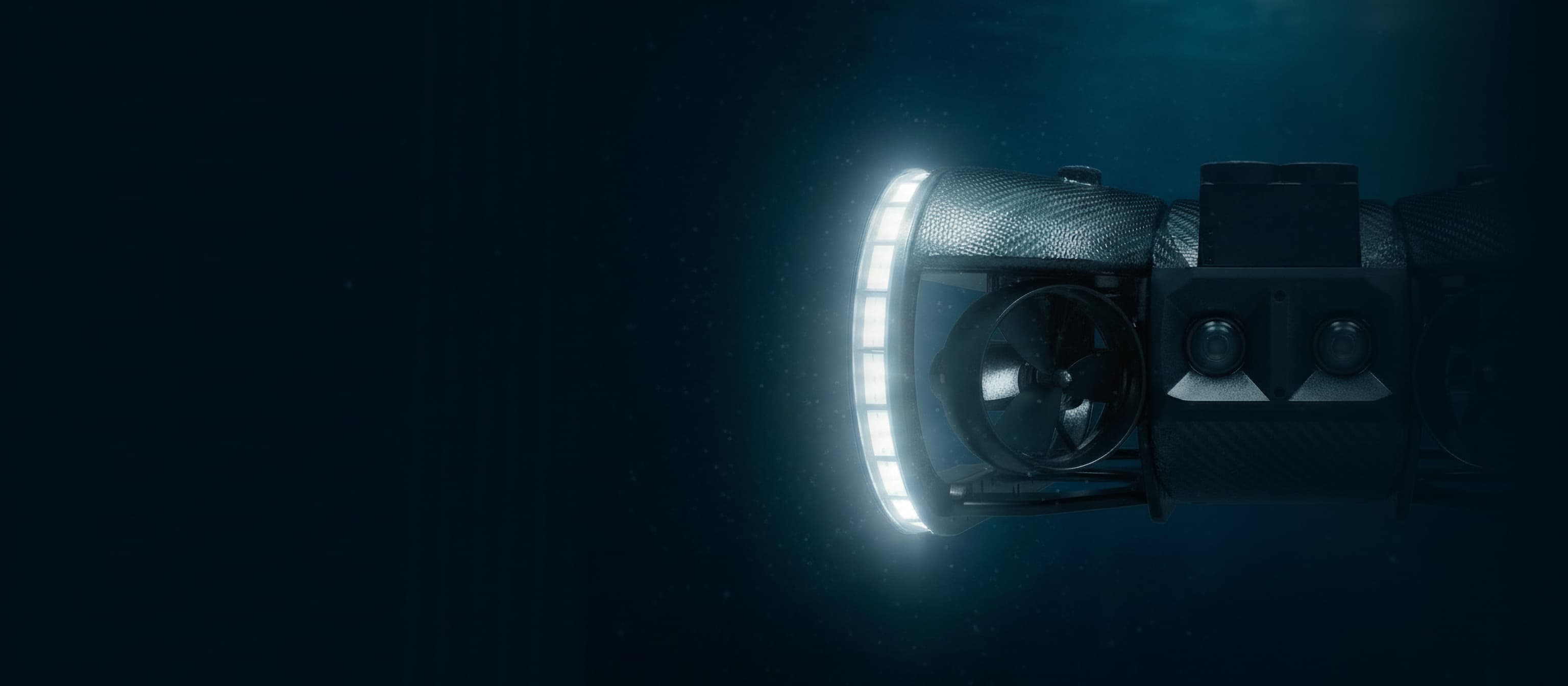
SPECTRA features a fully integrated, factory-calibrated rotating stereo 4K camera system operating up to 60 fps, paired with a high-output 300,000 lumen lighting array that dynamically tracks camera orientation. Unlike bolt-on stereo skids used in many systems, SPECTRA’s stereo vision is integrated directly into the vehicle architecture, preserving balanced handling characteristics.
Vishal Panchal, Perception Engineering Manager, discusses how the new stereo camera delivers advanced capabilities: “Our integrated stereo camera enables effective underwater 3D vision. With the Deep Trekker camera system, users can create photorealistic 3D models with metric scaling out of the box. This means that to model an underwater asset, there is no need to deploy a reference measurement marker. Users can start the inspection within the UI, download the data, and import the images into photogrammetry software to generate a fully scaled 3D model.”

The stereo system is factory-calibrated with a fixed baseline between the two lenses, enabling accurate depth measurements directly from the synchronized image pairs. This supports metrically accurate 3D model generation without the use of scale bars or external reference markers. The rotating camera assembly provides up to 180 degrees of rotation, enabling inspection above, below, and around structures without repositioning the vehicle body.
Panchal adds, “SPECTRA features a very powerful continuous lighting system that follows the camera head. This ensures illumination is always aligned with the optical axis. When paired with a large-format, high-sensitivity image sensor, this combination illuminates underwater scenes more effectively than ever.”
Ultra-bright LED arrays are selectively activated to follow the stereo camera’s orientation, directing light beams precisely where the camera is pointing. Even in dark water, the integrated lighting and imaging configuration enables clear image and video capture suitable for reporting and photogrammetric processing.
Operators initiate recording within the vehicle interface, collect synchronized stereo datasets, and export the data post-mission for processing in standard photogrammetry software. The resulting 3D reconstructions are photorealistic and dimensionally scaled for measurement and condition assessment reporting.
SPECTRA was engineered as industrial equipment intended for sustained daily operations. All major subsystems are designed to be replaced in 30 minutes or less:
The only non-field-swappable component is the structural frame. This modular architecture supports quick modular servicing, high uptime subsea operations, and rapid mobilization - minimizing mission disruption in remote or offshore environments.

“We wanted this vehicle to be as robust as possible,” explained New Product Development Team Lead Engineer, Owen Hooper. “It’s industrial equipment that operators will rely on day in and day out, so durability and repairability were top priorities. Ease of use was equally important - hand deployment ensures operators can simply place it in the water without requiring a crane or davit, making the system practical and accessible in the field.”
Two primary mission profiles shaped the SPECTRA architecture.
Hooper described the process: “When we were designing the SPECTRA, we were primarily focusing on two major missions. First, the capability to perform inspection and cleaning in the splash zone. Second, conducting deep-water operations, aiming for high-quality photogrammetry at extreme depths of up to 1,000 meters. These two missions defined the vehicle’s power, perception, and lighting requirements.”

1. Splash Zone Inspection & Intervention
High-current cleaning and inspection operations on ship hulls, moorings, FPSOs, and offshore structures. These environments demand strong thrust output, precise positional hold, and stable control response in challenging conditions.
2. Deepwater High-Resolution Inspection (1,000 m)
High-resolution visual inspection and mapping at extreme depth, requiring pressure tolerance, optimized lighting, and reliable sensor performance. Integrated 3D Sonar SLAM enhances situational awareness, enabling operators to understand structure geometry, verify coverage, and execute repeatable inspection paths even in low-visibility conditions.
These mission requirements directly influenced the vehicle’s propulsion system, perception stack, structural robustness, and lighting design, ensuring effectiveness in both high-current and deepwater operations.
SPECTRA is optimized for Offshore Inspection, Repair and Maintenance (IRM) scopes of work, delivering stable operations in currents up to 3 knots, 1,000m depth capability, integrated NDT tooling, and real-time 3D mapping - extending the operational envelope where compact systems traditionally reach their limits.

Serena Brown, Global Sales Manager, details the challenges of underwater offshore operations, and how SPECTRA aims to solve those long standing problems:
“Existing observation-class ROVs are often being pushed to the limits of station holding, low-visibility navigation, and repeatability. Operators frequently focus on maintaining position rather than efficiently completing missions. SPECTRA shifts this paradigm by providing greater thrust and stability for station holding in multi-directional currents, advanced perception through integrated 3D sonar and stereo cameras, and the ability to conduct repeatable, confident inspections in low-visibility or high-current conditions. This allows operators to focus on mission execution - how quickly data can be collected and tasks completed - rather than worrying about the vehicle’s ability to hold position.”
High-current stability and lateral control reduce operator workload and increase inspection repeatability.

SPECTRA supports tactical underwater operations requiring precision maneuvering, reliable station-keeping, and advanced sensor integration. Its high-thrust performance and modular architecture enable missions in contested or high-current environments.
The platform’s increased payload capacity and integration flexibility allow operators to deploy heavier or more complex sensor packages than previous compact systems could support.

Beyond offshore and defense, SPECTRA is engineered to meet the demands of many diverse subsea applications. Its stability, high-current performance, and advanced sensing allow operators to conduct inspections, surveys, and monitoring tasks efficiently across a range of industrial, environmental, and research sectors, such as:
Onshore Energy – Trash rack and intake screen surveys, tunnel inspections, structural assessments of submerged infrastructure.
Search & Recovery (SAR) – Target identification, evidence recovery, and submerged vehicle or vessel searches. Real-time sonar and high-output lighting support operations in zero-visibility and high-current conditions.
Aquaculture – Net pen inspections, mooring and anchor checks, and benthic surveys.
Marine Science – Repeatable surveys, deep-water research, seabed mapping, and long-term environmental monitoring.
Across all applications, SPECTRA’s combination of high-current performance, integrated 3D sonar SLAM, and modular serviceability delivers enhanced situational awareness and control, along with precise, complete, and actionable inspection data while supporting safe and efficient subsea operations.

As mentioned earlier, observation-class ROVs are frequently pushed to their limits in strong current and low-visibility environments. Operators often focus more on holding position than completing inspection tasks.
SPECTRA shifts that balance by combining:
The result is a system that reduces mission risk, increases repeatability, and supports detailed inspection output without the logistical burden of work-class vessels, large crews, or tether management systems.
During Operation: Powered by real-time 3D Sonar SLAM, operators gain unparalleled situational awareness and precise navigation while piloting the ROV, ensuring accurate and highly efficient inspections.
Post-Inspection: Upon mission completion, operators can seamlessly extract their data for reporting and analysis, including:
While the SLAM point clouds and navigational paths instantly elevate your standard reports, the exported stereo datasets can be further processed into high-resolution 3D asset models for detailed measurement and condition analysis.

SPECTRA combines high thrust, advanced perception, and modular serviceability within a compact, deployable platform. It is engineered for environments where current, depth, and spatial uncertainty traditionally limit portable ROV performance.
By integrating symmetrical thrust architecture, real-time 3D sonar SLAM, factory-calibrated stereo 4K vision, and onboard compute into a 1,000-meter-rated system, Deep Trekker introduces a new operational category: a high-power, high-fidelity inspection ROV that maintains portability while expanding capability.
“The SPECTRA’s forward speed performance is unparalleled in its size class. It’s incredibly fun to operate, and I enjoy sharing that experience with others,” Hooper remarked.
For offshore operators, defense teams, and subsea inspection professionals, SPECTRA delivers measurable gains in stability, spatial awareness, and data quality - without increasing operational burden.
Deep Trekker is a global leader in portable industrial-grade ROV systems, consistently at the forefront of subsea innovation for over a decade. The company designs and manufactures vehicles for inspection, survey, defense, energy, infrastructure, and marine research applications worldwide.
Sign up to receive more detailed technical specs for SPECTRA ROV.
Check out the SPECTRA Shop Page here.
Find more information on Oceanology International here.
For product and training information, visit the Deep Trekker website or get in touch with one of our specialists.


March 17th, 2026
Two-day AIMS training program teaches SAR teams how to integrate sonar...
March 11th, 2026
Deep Trekker’s SPECTRA ROV integrates 3D Sonar SLAM, 4K stereo vision,...

November 3rd, 2025
At REPMUS 2025, Deep Trekker’s ROVs validated real-world mine countermeasure capabilities...