Configure Now
Articulos en tu carro de compras0
0Articulos en tu carro de compras
Comienza a creando su paqueteCompra Ahora
Uno de los mayores desafíos para los buzos y los pilotos de vehículos operados a distancia (ROV) es la navegación submarina, especialmente en condiciones de poca visibilidad. Las inspecciones submarinas pueden ser peligrosas, costosas y, en algunos casos, imposibles de realizar para los buzos SCUBA. Muchas industrias están recurriendo a pequeños drones submarinos, llamados ROV, para llevar a cabo estas operaciones.

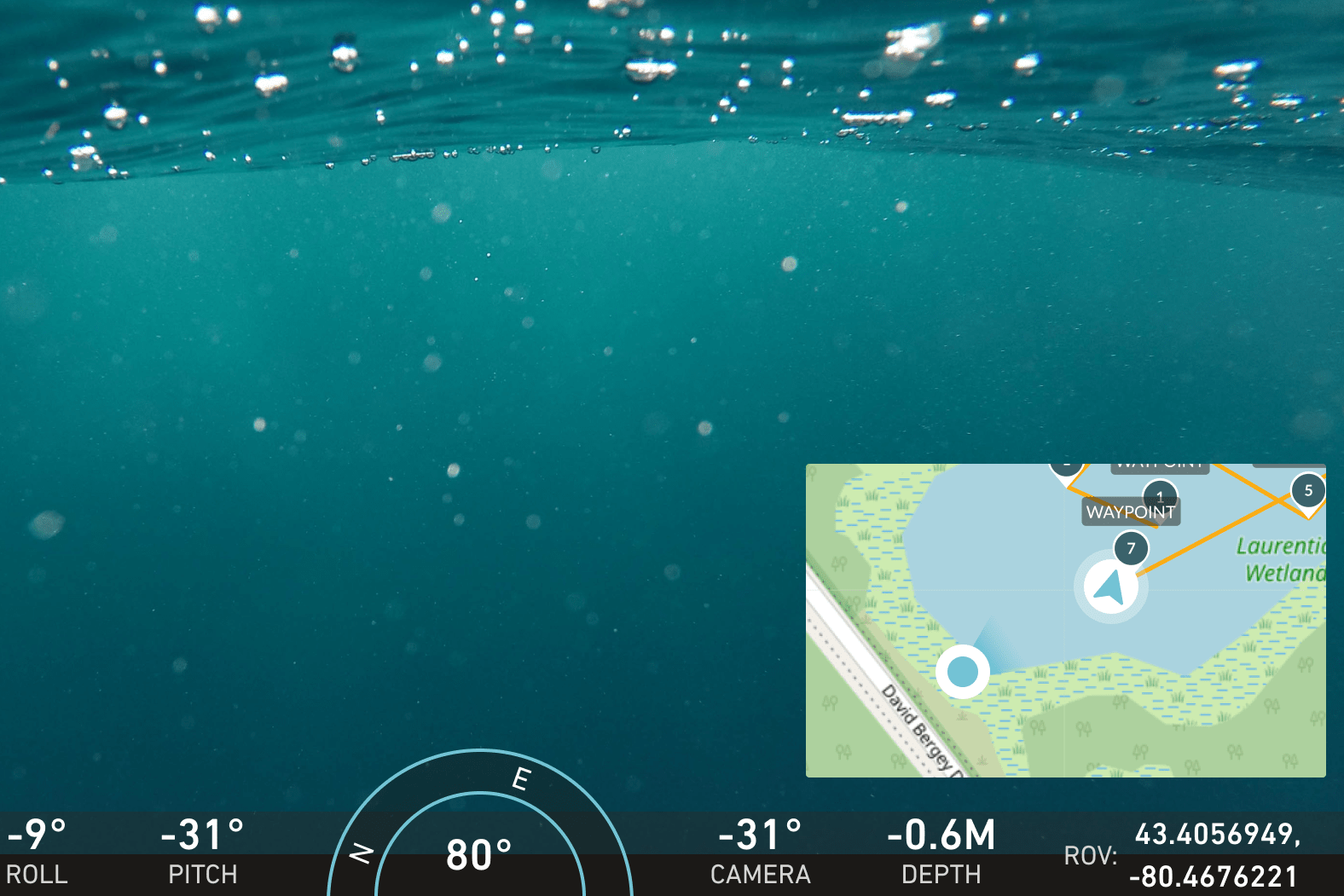
A medida que las nuevas tecnologías se miniaturizan y los procesos de fabricación se abaratan, los ROV de última generación se equipan con una serie de sensores especializados conectados a pequeñas computadoras de mano. Estos sensores informan datos de telemetría detallados al piloto y también permiten que el ROV se comporte de forma autónoma mejorando la facilidad de uso. Por ejemplo, los pilotos de drones aéreos están acostumbrados a los datos de GPS en tiempo real y al mantenimiento autónomo de la posición. Los ROV pueden usar la triangulación acústica para brindar a los pilotos una visualización de mapa en movimiento en tiempo real y cuando se combinan con otros sensores, pueden mantener su posición de forma autónoma, seguir puntos de ruta o regresar a casa. La navegación submarina es mucho más difícil que la navegación aérea, ya que la visibilidad suele ser escasa y el agua absorbe las ondas de radio. Los ROV avanzados utilizan sensores acústicos revolucionarios para lograr las mismas proezas de autonomía que los drones aéreos.
Cuéntenos como le podemos ayudar a encontrar los accesorios ROV para mejorar la navegación submarina
La IMU básica y los sensores de profundidad no son tecnologías novedosas, pero con nuevos procesadores miniaturizados, permiten un control estricto y estable de un ROV utilizando algoritmos de autonomía integrados. La IMU proporciona datos sobre balanceo, cabeceo y guiñada. Además de mostrar un rumbo de brújula en la interfaz de control de los pilotos, los ROV avanzados monitorearán constantemente la velocidad de rotación a lo largo de los tres ejes, disparando automáticamente los propulsores para contrarrestar cualquier movimiento. Esto actúa para estabilizar la transmisión de video ayudando significativamente con la navegación submarina. Al contrario de lo que podría pensar, las entradas de control para estos movimientos no son una función directa de entregar potencia a los propulsores en función del desplazamiento del joystick, sino que un algoritmo decide una velocidad objetivo en función del desplazamiento del joystick. El ROV calcula la cantidad de energía que debe enviar a cada propulsor para lograr ese objetivo. Si los joysticks están centrados, la velocidad objetivo es cero. Esto significa que cualquier velocidad de rotación introducida por la corriente o la tensión en la correa se contrarrestará y los comandos de su joystick se ejecutarán sin problemas. Lo más notable es que el impulso de rotación se cancelará de manera efectiva. Cuando un piloto quita el pulgar de un joystick, el ROV dejará de girar y permanecerá en su lugar. En cuanto al sensor de profundidad, otro algoritmo puede controlar los propulsores verticales para mantener el ROV exactamente a la profundidad que dejó el piloto.

Navegar solo con la brújula bajo el agua es difícil, entonces, ¿por qué no usar el GPS? Las señales de radio de los satélites GPS utilizados por los drones aéreos son absorbidas por el agua, lo que las hace inútiles para los ROV. Como resultado, los pilotos de ROV han favorecido los sistemas con integración USBL y DVL para ayudar en la navegación submarina. Un USBL puede triangular la posición de los ROV una vez por segundo para proporcionar una visualización de mapa en movimiento, registrar una línea de seguimiento y colocar puntos de interés. Simultáneamente, un DVL hace rebotar ondas de sonido en el lecho marino para determinar la velocidad y la dirección del movimiento cada 100 milisegundos, lo que da lugar a algoritmos de estabilización similares a los que se utilizan para balanceo, cabeceo, guiñada y profundidad. El ROV ahora puede mantener su orientación y su posición en las tres direcciones combatiendo automáticamente la corriente, suavizando movimiento y cantidad de movimiento cancelada. La medición de altitud también se puede utilizar para establecer una distancia objetivo desde el fondo, en lugar de una profundidad objetivo, y el ROV puede ascender y descender automáticamente a medida que avanza sobre un lecho marino irregular.

La magia de los nuevos ROV de última generación proviene de la integración de todos estos sensores directamente en el sistema de control que realiza un proceso conocido como "fusión de sensores". Aquí es donde se comparan todos los diferentes flujos de datos, desechando los datos incorrectos y creando la mejor estimación posible de la ubicación actual. El DVL extiende la estabilidad de la IMU y proporciona una mejor respuesta de control, eliminando el impulso lateral además de una retención de profundidad más estricta. La IMU proporciona el rumbo de la brújula a la visualización del mapa en movimiento. La latitud y la longitud de USBL serán significativamente más precisas cuando se comparen con los datos de velocidad y acelerómetro, y los espacios entre los pulsos de un segundo se pueden completar con los datos de DVL. Los datos de DVL se mejoran comprobando los datos del acelerómetro. Las interconexiones siguen y siguen. Al integrar herramientas clave de navegación submarina, los ROV hacen que la navegación con brújula sea cosa del pasado, ya que los pilotos siempre saben exactamente dónde están y tienen un piloto automático que estabiliza sus movimientos.
El Revolution ROV fue diseñado para ser una plataforma que puede conectarse en red con numerosos complementos modulares. Los ROV de Deep Trekker utilizan un sistema operativo personalizado que se ejecuta en una computadora integrada en el controlador manual que está conectado en red con el cuerpo del ROV, la cápsula del sensor y el cabezal de la cámara.

Esta novedosa ”Bridge Technology” permite sistemas de sensores de terceros de vanguardia para ser conectado directamente al ROV con sus datos siendo procesados en tiempo real por el controlador. El sonar de imágenes multihaz se puede montar en el cabezal de la cámara giratoria, se puede ver directamente en el controlador y se registra en una tarjeta SD mientras se graba video, se toman fotografías y se graba un registro de seguimiento USBL al mismo tiempo.
El oxígeno disuelto puede montarse y mostrarse en el controlador manual, así como registrarse con GPS y datos de profundidad cada segundo. Los sistemas USBL y DVL se integran a la perfección en el paquete de navegación y muestran un mapa en movimiento simultáneamente con la transmisión de imágenes del sonar.
El software de mapas patentado instalado en los controladores Bridge contiene nuestro propio algoritmo de fusión que combina datos de todos los sensores e incluso compensa los campos magnéticos fluctuantes de diferentes combinaciones de salida del propulsor. Esencialmente, el sistema ROV es capaz de analizar su entorno, mejorar su comportamiento y hacer que la navegación submarina sea sencilla. Las actualizaciones de software que se realizarán más adelante en 2021 brindarán a los pilotos la capacidad de programar puntos de referencia y cuadrículas de búsqueda con el ROV navegando de forma autónoma en modo de piloto automático. El futuro de la robótica es la autonomía, y Revolution NAV es el kit de hardware necesario para nuestro software de autonomía en evolución.

Puede obtener más información sobre cómo se utilizan los vehículos Deep Trekker para la navegación submarina en nuestros estudios de casos sobre recuperación de evidencia submarina y el hallazgos arqueológicos revolucionarios en el Estrecho de Mackinac. Nuestro equipo de expertos de la industria siempre está aquí para responder cualquier pregunta que pueda tener, comuníquese hoy!
¿Quiere dar el salto y crear su propio paquete ROV? Podemos hacer un paquete personalizado de Deep Trekker solo para usted. Solicite una cotización hoy para comenzar.
July 30th, 2021
Conoce todo sobre los pilotos de vehículos operados remotamente (ROVs): cómo...
November 5th, 2024
Learn more about what sonar is and its many uses. Read...
December 23rd, 2021
ROVs and sonar can be used to inspect underwater structures such...