Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now


Understand your position and help your ROV stay on course with the Sensor package. This package has a 9 axis IMU and pressure sensor which enables the ROV to understand its depth, heading, water temperature, pitch, roll and turns count. This also allows you to activate automatic stabilization features for consistently smooth piloting.
Error adding item to quote
Added to quote


Auto heading
500m Depth Rating
Active yaw stabilization


Pitch, roll & turns count
Water temperature
Sensor Package for Navigation and Stabilization

The depth data tells you how deep the ROV is based on the water above your ROV as well as enables Auto Depth functions to hold depth at a single position or over the span of a dive.

The heading data indicates the ROV's compass direction on screen with a rotating compass rose and a number between 0-360 degrees.
The heading can be set to Auto Heading to hold a compass direction while driving in a straight line to ensure staying on course.

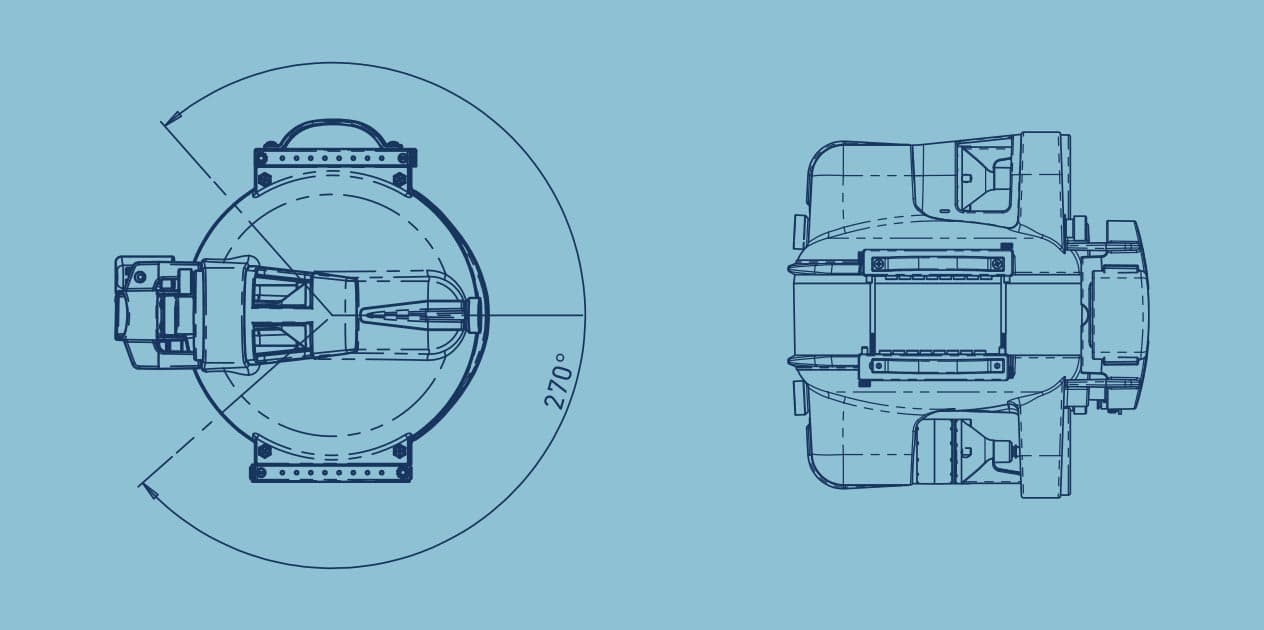
When turning, the sensors enable Active Yaw Stabilization, which counter steer at the end of turns to ensure that there is no "drifting" that tends to happen with underwater ROVs.
Drifting can cause the ROV to lose its course, especially in current. The roll indication can help determine if you are in an extremely high current or stuck on an object since it indicates how much the ROV is rotating left/right on the vertical axis.
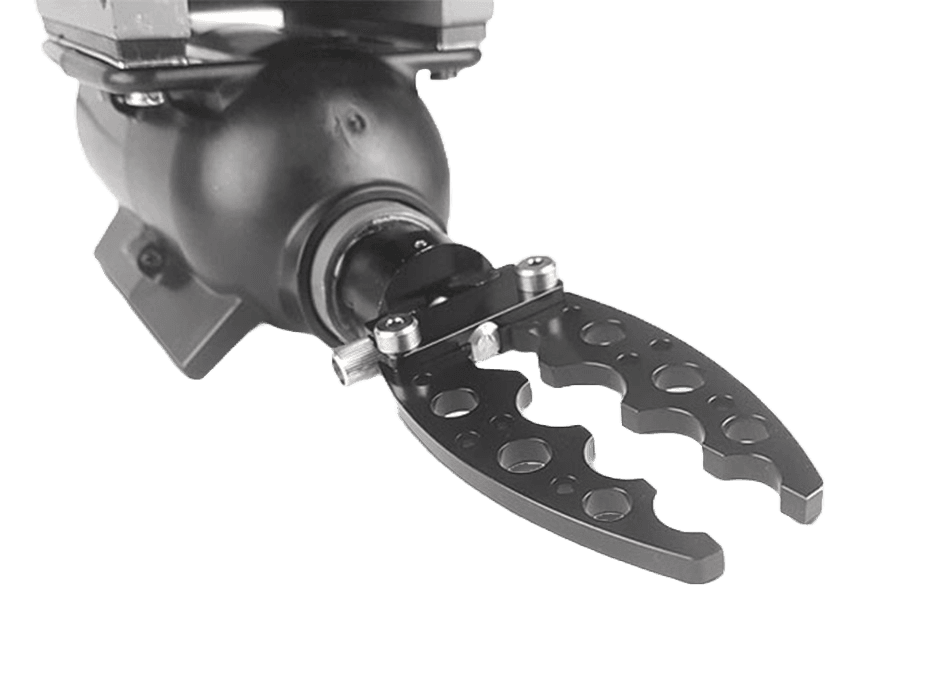
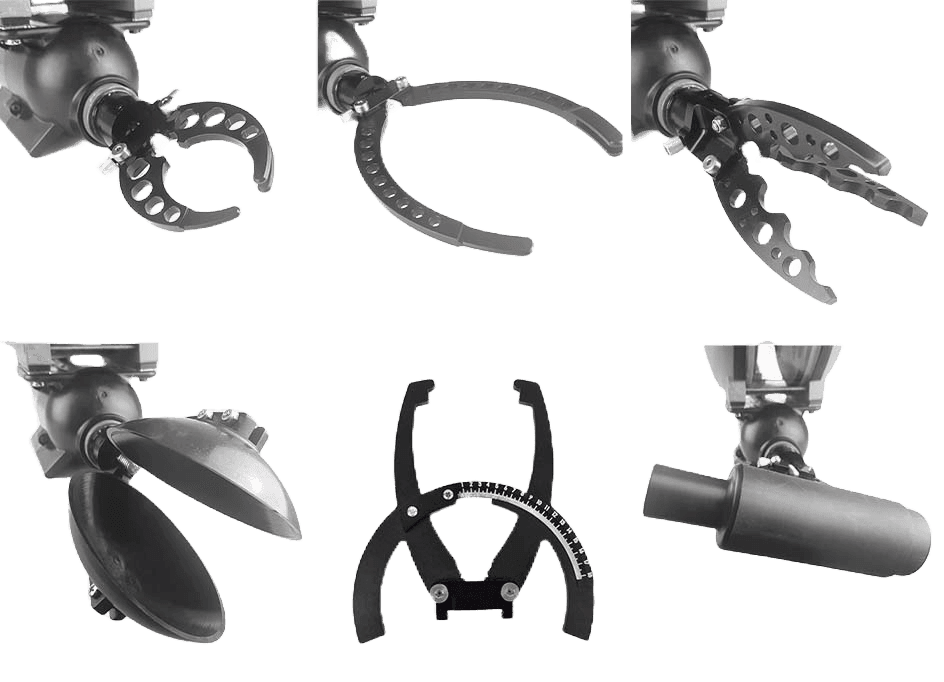
The pitch reading indicates what orientation the ROV has on the vertical axis facing forwards/backwards, which is useful to know when you want to know what direction your add-ons are facing or when you want to lock an angle to ensure optimal performance of a sonar or grabber.

The turns count is useful to know when you are in tight spaces and want to ensure you are not making circles around obstacles like pilings or pillars.
| Roll | ±3° |
|---|---|
| Pitch | ±3° |
| Heading | (Magnetic) ±10° |
| Temperature | ±2°C |
| Depth | ±0.5% full scale |
Sensor Package for Navigation and Stabilization
The depth data tells you how deep the ROV is based on the water above your ROV as well as enables Auto Depth functions to hold depth at a single position or over the span of a dive.
The heading data indicates the ROV's compass direction on screen with a rotating compass rose and a number between 0-360 degrees.
The heading can be set to Auto Heading to hold a compass direction while driving in a straight line to ensure staying on course.
When turning, the sensors enable Active Yaw Stabilization, which counter steer at the end of turns to ensure that there is no "drifting" that tends to happen with underwater ROVs.
Drifting can cause the ROV to lose its course, especially in current. The roll indication can help determine if you are in an extremely high current or stuck on an object since it indicates how much the ROV is rotating left/right on the vertical axis.
The pitch reading indicates what orientation the ROV has on the vertical axis facing forwards/backwards, which is useful to know when you want to know what direction your add-ons are facing or when you want to lock an angle to ensure optimal performance of a sonar or grabber.
The turns count is useful to know when you are in tight spaces and want to ensure you are not making circles around obstacles like pilings or pillars.
| Roll | ±3° |
|---|---|
| Pitch | ±3° |
| Heading | (Magnetic) ±10° |
| Temperature | ±2°C |
| Depth | ±0.5% full scale |

We use cookies to collect information about how you interact with our website to improve and customize your experience. To find out more about the cookies we use, see our Privacy Policy.