Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
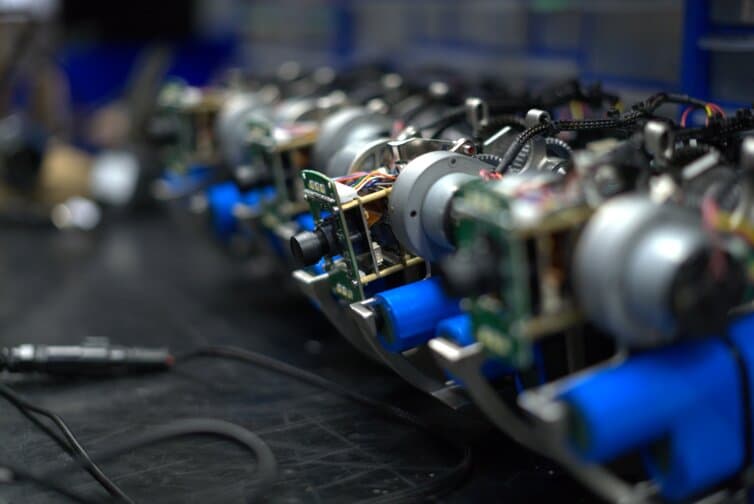
Learn more about what goes into building a robust Deep Trekker ROV. Hear from the Deep Trekker team about the importance of manufacturing, materials and more.
Magnetic coupling offers a non-contact transfer of torque by using a magnetic field rather than a physical mechanical connection. Magnetic coupling offers Deep Trekker pilots a convenient vehicle with little maintenance. As the two surfaces do not slide against each other they do not require replacements or realignments. Furthermore there is a real ease of maintenance as systems do not require greasing, oiling or nitrogen gas refills. Perhaps most importantly, magnets do not wear down over time, so our robots outlast other designs giving you a robot you can rely on each time you call on it for a mission.
Submersible ROVs can be made with a variety of materials such as plastic, titanium, stainless steel and aluminium. From transportation and handling to underwater collisions, an ROV has to withstand tough environments. ROV materials also must be lightweight to maintain neutral buoyancy for ease of navigation and optimal power use. It is imperative that smaller ROVs, like Deep Trekker’s vehicles, are neutrally buoyant. Heavier metals and materials would sink the ROV, making it work harder to maintain neutral buoyancy and making navigation harder. With aluminium and carbon fiber Deep Trekker ROVs are neutrally buoyant on their own, without having to waste battery life. While light, aluminum and carbon fiber are durable. Submersible ROVs face harsh conditions and do difficult jobs - the use of aluminium and carbon fiber strikes a balance between lightweight and strong.
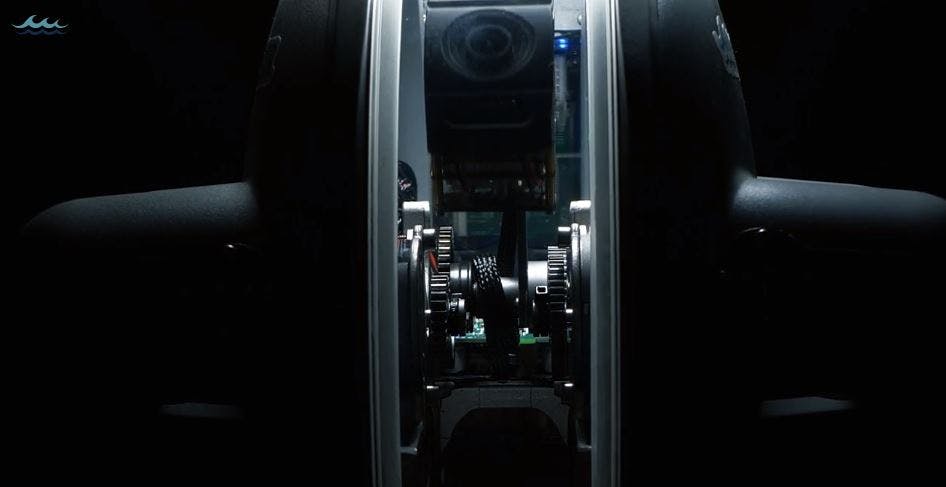
There are many different types of gears used in robotic systems. Different gear materials provide numerous advantages and disadvantages. Steel alloy spokes are durable which is imperative in ROV construction. Particularly useful for fast moving systems, steel alloy gears provide the Deep Trekker team with the durability and toughness required for top notch ROV construction.
Learn more about which underwater ROV is best for your application
Using magnetic fields, Hall effect sensors are used to detect variables such as the proximity, speed, or displacement of a mechanical system. Deep Trekker vehicles use hall effect as their small size allows the sensors to be easily integrated into the vehicle to provide accurate information.
The lens cover of an ROV is crucial to the overall function of the vehicle. As a submersible vehicle allows users to get eyes underwater an effective lens cover is an absolute necessity. Acrylic and sapphire are the ideal material for Deep Trekker vehicles. Striking the perfect balance between clarity and durability, our lens cover can withstand the rigours of underwater work while still providing a clear view.
Latency is a delay from control input to the robot executing the control. Latency can also refer to a delay from camera or sensor feedback on the vehicle to the controller display. Latency has massive impacts on ROV operations. Control and navigation becomes incredibly difficult making precise and technical tasks tedious. BRIDGE technology is an operating system designed around creating a virtually zero latency experience. Controllers that rely on bluetooth and/or wifi connection to a mobile device inherently create latency which make control difficult and frustrating. BRIDGE enhances operation capabilities with a seamless technology platform for Deep Trekker DTG3 and REVOLUTION underwater robots. Advanced algorithms allow for seamless response between the controller and vehicle while the improved intelligence platform has the capability to integrate with current and future third-party integrations.
As the underwater technology space advances, with new innovative sensors and accessories becoming available, it has become critical to leverage standardized and commonly used communication interfaces and protocols. By utilizing the same interfaces as many third party integrations and tools, communication is seamless and straightforward. Deep Trekker’s BRIDGE technology, was an early adopter of the IP network topology, making use of the established Ethernet interface. This capability has enabled the ability to integrate many cutting edge technologies such as Sonars, DVLs , and Cameras.
The number of thruster configurations on a ROV are limitless, both in thruster count and arrangement on the vehicle. Deep Trekker has taken the approach of two primary configurations, to best suit the different needs of customer applications. The DTG3 makes use of just two thrusters, and a patented pitching mechanism. This configuration provides a superbly nimble platform, with the added benefit of a compact form factor and high reliability due to fewer moving parts. The REVOLUTION targets applications that require a highly stable platform, capable of enhanced maneuverability. To achieve this, a six thruster configuration was adopted, allowing for full lateral control without compromising on stability.

July 30th, 2021
Learn all about remotely operated vehicle pilots: how to become one,...

November 5th, 2024
Learn more about what sonar is and its many uses. Read...

December 23rd, 2021
ROVs and sonar can be used to inspect underwater structures such...