Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
Sonar systems serve a wide range of purposes. This guide covers key aspects of sonar technology, including its role across offshore energy, oil and gas, nuclear, infrastructure, defense, and marine research applications. It outlines how sonar is used for underwater inspections, search and recovery, bathymetric surveys, and subsea asset assessment, while also examining system types, sensor categories, and operating principles. Advanced capabilities such as 3D mapping, spatial awareness, and SLAM-based positioning are also explored, demonstrating how modern sonar systems support accurate navigation, real-time visualization, and reliable data capture in complex underwater environments.
Sonar is often the preferred tool for underwater professionals operating in environments where visibility is limited or nonexistent. Utilizing sonar can be more of an art than science in many cases, so it can be challenging for those initially exposed to it. It's a powerful option to have though, as it can provide position information, context for the environment around you, and imaging capabilities in even the murkiest water.
There are different types of sensors that utilize acoustic technology:
While each of these technologies serves a unique purpose, this article focuses on how sonar is applied in underwater inspections and surveys, where reliable data collection and positioning are required.

Sonar systems support:
Underwater applications for sonar include:
Discover how sonar makes search and recovery missions safer and effective, and explore the benefits of integrating Deep Trekker ROVs with side-scan sonar.
Since GPS is ineffective underwater and capturing quality imagery with a camera can be difficult in murky conditions, sonar is a valuable technology for underwater tasks.
Sonar (sound navigation and ranging) uses sound waves to map and detect objects. Sound waves are emitted, some bouncing off objects and returning to the emitter. By measuring the time it takes for the sound to return, the distance to the object can be calculated.
Although often attributed to Leonardo Da Vinci, sonar has been used by animals like whales and bats for millions of years. Whales, for example, can detect objects as small as rocks from over 60 feet away and rely on sonar more than their vision.
Sonar can tell us the following information about the seafloor:
Here is a breakdown of how underwater sonar works in practice.
Talk to us about which ROV sonar system is best for your application
Human ears and voices represent the simplest form of sonar, similar to how we hear echoes. Modern sonar systems, however, offer high resolution and range, with military sonar capable of covering 80% of ocean floors from just four vantage points.
Despite the speed of light and RADAR’s velocity, only sonar can map seafloors, create nautical charts, and locate hazards and shipwrecks. After the Titanic disaster, sonar technology advanced significantly, particularly during the World Wars, leading to two main types:
Active sonar uses a projector to send sound waves that bounce off objects and return to the receiver, helping determine range, bearing, and motion. Submarines use active sonar to detect nearby objects by measuring the time delay between transmission and the echo. Advanced modern tools can also identify an object’s size, shape, and orientation in detail.
Deep Trekker ROVs (remotely operated vehicles) utilize active sonar which sends out a sound wave at a particular frequency and then listens for how long it takes for that sound wave to return after bouncing off objects in the water and the seafloor. Multibeam imaging sonar uses multiple beams of sound to paint an image of what’s in front of the ROV.
Passive sonar doesn’t emit sound but listens for signals from other objects, such as sea life or ships. These are also referred to as Hydrophones. They are used for surveillance and can only determine the sound source location with the help of additional listening devices. They must work together to determine the transmitter location without having their presence known (in a military setting).
CHIRP (Compressed High-Intensity Radar Pulse) sonar is used for bottom-tracking and fish-finding. It sends a sweep of frequencies, offering more detailed imaging than traditional 2D mechanical sonar. The transducer vibrates at a low frequency with each pulse. This is modulated upward at a high frequency for the duration of the pulse.
Sonar devices can be classified into different categories based on their applications and capabilities. Two noteworthy categories are:
Echosounder sonars are instrumental in conducting bathymetry studies. They are widely used in various maritime applications, including navigation for ships, charting for safe passage, underwater mapping for scientific research, and assessing potential hazards beneath the water's surface.
There are two main types of echosounders commonly used for these surveys: single beam and multibeam. Through the application of these echosounder technologies, operators can gain valuable data to improve navigation safety, understand underwater topography, and enhance their knowledge of marine environments.
Single-beam echosounders send a single pulse of sound directly downward toward the seafloor. Boats and fish finders use them to perform straightforward depth measurements.
When piloting ROVs, echosounders can be used for measuring altitude above the seafloor and avoiding obstructions. Typically they come in dual frequency configurations, allowing for adjustments in the range of the sonar in real-time. Low frequency offers a longer range, with a sacrifice in resolution, while high frequency is ideal for close range and produces a higher resolution result.
Because single beam echosounders are relatively simple, they are the most cost-effective and easy to operate option for bathymetric surveys, and are particularly useful for small-scale hydrographic surveys, environmental monitoring, and research in shallower waters.
However, their narrow coverage area requires multiple survey lines for larger areas, and data accuracy can be influenced by factors like temperature and salinity. As a result, data acquisition with single beam echosounders can be incredibly time-consuming for extensive bathymetric mapping.
Like single beam, multibeam echosounders (MBES) measure water depth, but with much more detail, utilizing multiple beams to cover a wider area, allowing for a more detailed and efficient mapping of the seafloor or lakebed.
This high resolution bathymetric data shows details that are instrumental for accurate hydrographic surveying, underwater mapping, oceanographic research and exploration, and navigation for all types of marine vessels.
The ability to see shapes and detect objects on the seafloor reveals details about the seafloor, such as seamounts, trenches, and valleys; as well as objects such as sunken ships. However, the extra complexity comes at a higher cost, and requires advanced data processing and specialized software to extract the information from the raw data.
The extra complexity can also yield unwanted results, since it’s more likely to pick up things like marine life, water bubbles, or particulate matter, which can affect the accuracy of the results and require more granular processing and filtering of the data.
Unlike echosounders, which provide depth information, imaging sonar produces detailed visual representations of the underwater environment. These devices emit sound waves and capture the reflections to create images, allowing researchers, divers, and marine scientists to study marine life, locate wrecks, and map the seafloor or lakebed accurately.
The high-resolution images provided by imaging sonar enable the exploration of underwater structures and environments with remarkable clarity, making it a valuable tool for scientific research, underwater archaeology, and various marine applications such as 2D and 3D modeling.
3D sonar, for example, provides volumetric imaging beyond traditional 2D scans by capturing dense point cloud data that represents the full geometry of an environment, rather than a single slice or planar view. This allows operators to understand spatial relationships between objects—such as distance, orientation, and relative positioning—in three dimensions.
Instead of interpreting multiple 2D passes, the system reconstructs a continuous 3D model in real time or during post-processing. This improves measurement accuracy for features like defect size, sediment volume, and structural deformation. In inspection scenarios, it also enables complete coverage verification, as operators can visualize exactly which areas have been scanned and identify any gaps immediately.
When combined with SLAM, 3D sonar supports simultaneous mapping and localization, maintaining positional accuracy in GNSS-denied environments while building the 3D dataset.
Recent advancements in sonar technology have enabled fully three-dimensional mapping of underwater environments using 3D imaging sonar combined with Simultaneous Localization and Mapping (SLAM) algorithms. Unlike traditional 2D or multibeam sonars that provide planar or depth-based images, 3D sonar captures volumetric data, producing point clouds that represent the full geometry of submerged structures, pipelines, or terrain.
SPECTRA, a high-performance ROV designed for offshore and industrial inspections, integrates 3D sonar with SLAM to navigate GNSS-denied environments. The system continuously generates a 3D point cloud while simultaneously estimating the vehicle’s position in real time.
This allows operators to:

The integration of 3D sonar SLAM enhances operational confidence, as operators can confirm their path and inspection coverage immediately, rather than relying solely on post-mission analysis. For instance, pipelines or subsea assets can be surveyed in real time, with the point cloud enabling precise measurement of defects, sediment build-up, or foreign objects.
Navigation underwater has long been a challenge, especially in GNSS-denied environments. With SPECTRA and 3D sonar SLAM, we can now capture accurate, continuous mapping while maintaining situational awareness, allowing inspections to be verified as they happen.

Discover how remote visualization using ROVs enables efficient monitoring, and maintenance of underwater assets by exploring the capabilities of advanced modeling techniques.
Scanning imaging sonar devices utilize a rotating transducer to emit sound pulses in multiple directions, creating a comprehensive 3D image of the underwater surroundings. These devices excel in revealing underwater structures, marine life, and complex terrains, serving scientific research, construction projects, and underwater inspections. Particularly valuable in low-visibility conditions, scanning imaging sonar aids in navigation, object detection, and detailed imaging.
Multibeam imaging sonar devices, also known as “forward looking sonars”, are advanced systems that emit multiple sound beams to cover a wide area simultaneously, providing accurate and efficient mapping of large areas.
They also update the image multiple times per second, which is much faster than scanning sonar, making it an invaluable tool for hydrographic surveys, oceanography, search and recovery, and underwater mapping projects.
Multibeam imaging sonar devices conveniently mount to Deep Trekker ROVs or Utility Crawlers for effective target identification in turbid waters. Below are the models available through Deep Trekker:
M370S: Designed for long-range navigation and low-resolution imaging, this sonar is ideal for open-ocean surveys and shipwreck hunting with an operating range up to 200 meters.
M750D: A versatile dual-frequency sonar, combining high-resolution imaging for short-range tasks with an extended range for navigation. It is well-suited for both short and long-range operations, making it a best-selling model.
M1200D: Operating at a peak frequency of 2.1MHz and equipped with a 2.5mm range resolution, this sonar is ideal for detailed close-range inspections, including search and recovery, EOD (Explosive Ordnance Disposal), and MCM (Mine Countermeasures).
M3000D: The highest frequency sonar in its class, specifically designed for precise short-range imaging and inspections. It is optimal for detailed examinations of tunnels, tanks, walls, and ship hulls.
C550D: A compact and cost-effective option with a maximum range of 100 meters, the C550D offers lower resolution than higher-end models but delivers essential imaging capabilities for budget-conscious operations.

Unlike conventional imaging sonar, 3D sonar adds a volumetric layer to the operator’s view, improving navigation, obstacle avoidance, and inspection accuracy—particularly in zero-visibility conditions. This makes it well-suited for applications including offshore inspections, nuclear facility maintenance, subsea construction, and asset integrity assessments.
3D Sonar provides real-time 3D visualization through a live point cloud, accessible via a web-based GUI or integrated software interface. Operators can monitor and interpret spatial data directly from their control station, using the sonar’s IP connection through the BRIDGE controller.
With both 2D and 3D operational modes, the system supports flexible deployment depending on the task. A detailed API also enables integration with third-party software for advanced data processing, automation, or custom workflows.
3D Sonar integrates with Deep Trekker SPECTRA, REVOLUTION, and PIVOT ROVs, adding a spatial data layer to standard video and sonar feeds for improved situational awareness during inspections. On SPECTRA, this capability can be paired with 3D sonar-based SLAM, enabling real-time localization and mapping in GPS-denied environments for more accurate navigation and repeatable inspection workflows.

Side scan sonar is specifically designed to produce detailed images of the seafloor or lakebed along a transect line, and can be mounted on the hull of a ship or ROV for submerged object detection. It emits sound waves perpendicular to the direction of travel and captures the reflections from the seafloor.
This type of sonar provides information about the shape and texture of the seafloor by creating black and white, or grayscale images - where lighter shades represent hard, reflective surfaces, and darker shades indicate softer, less reflective areas.
Side scan sonar is widely used for large areas of seafloor imaging, underwater search and recovery operations, maritime construction, and archaeological explorations. Best suited for large-area searches when deployed on an Autonomous Underwater Vehicle (AUV) or surface vessel. On ROVs, side scan sonar is particularly useful for scanning larger areas in confined or hard-to-reach spaces, covering more area than standard imaging sonar.
Deep Trekker offers side scan sonar options for both the REVOLUTION and PIVOT ROVs.

One powerful option to consider is USBL (Ultra-Short Baseline), which integrates seamlessly with sonar systems. USBL and sonar technologies make it simple for operators to determine their location and understand what they’re observing underwater, making them indispensable for ROVs. From search and recovery to salvage operations and defense, these technologies offer precision and reliability across a range of applications.
USBL uses triangulation to pinpoint the ROV’s position, with a transducer at the surface and a transponder on the ROV — essentially creating an underwater GPS. Mapping software, such as Google Earth, can display this positioning information in real time with an impressive 20 cm accuracy. By combining this data with a GPS coordinate at the transducer’s location, operators can estimate the ROV's position with high precision.
Real-time map overlays simplify positioning and navigation, which is especially valuable in industries like search and recovery, where USBL systems assist with navigating large or complex search areas. USBL is also invaluable in maritime applications, helping operators know exactly where their ROV is in relation to their target. In underwater inspections, USBL guides pilots with accurate location data, enabling them to remain oriented with respect to the structures they’re assessing.
Explore our comprehensive guide providing invaluable insights of sonar technology and its diverse applications.
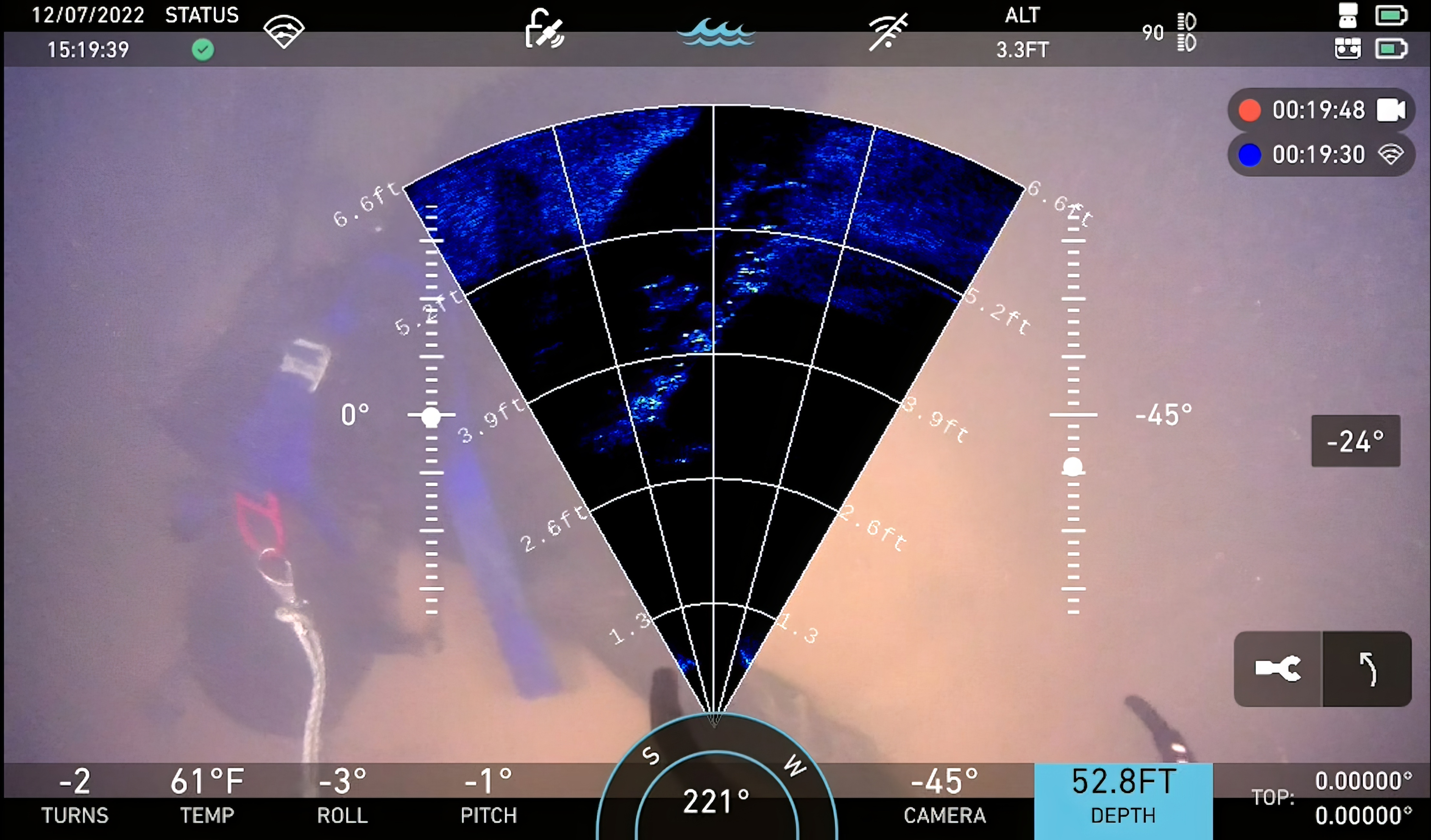
Sonar systems use fan-shaped sound beams with narrow horizontal and broad vertical ranges, effectively mapping cross-sections in the environment. This technology requires a deep understanding of acoustics to make accurate readings.
Sonar calculates distance by multiplying the speed of sound in water by the time for an echo to return, using the formula:
Distance = known sound speed in water x (calculated sound delay upon return / 2)
Variations in temperature, depth, and salinity affect sound speed, typically around 1500 m/s in saltwater. Calculators are often used to refine accuracy in changing conditions, as scanning sonar systems cannot directly measure sound speed.
Reflectivity varies by material; objects like rocks and metals give strong echoes, while softer surfaces like sand, mud, silt, and plants absorb more sound. Sonar echoes are displayed in bright colors for strong reflections and darker tones for weaker ones.
Using rotating transducers, sonar systems scan the environment in an arc, similar to a flashlight, capturing slices of the surroundings for a complete image. If you take pictures of the area as the light sweeps across the room, you will capture slices of the room that are illuminated. While you won’t see the entire room lit up at once, combining these slices will provide a complete view of the area that was illuminated.
Sonar only visualizes objects within its beam, and cannot distinguish between overlapping objects at the same slant range (vertical arrival angle).
For example, if two objects are positioned one above the other at the same slant range in front of the sonar, they will appear as a single object on the display due to the overlapping of their echoes.
For those surveying the bottom of a body of water, understanding that signal strength decreases over longer distances, sonar systems can be mounted at specific angles to improve image clarity. This positioning produces clearer sonar images of the seabed on the display.
If the system is angled steeply downward at a low altitude, only a narrow area will appear on the display. As altitude increases, the sonar system will illuminate a broader expanse of the seabed.
When a human operator searches for objects on the seabed, optimal sonar results are achieved by adjusting the altitude and angling the system downward. This positioning maximizes the imaging range and signal strength for clearer bottom visuals.
Learn about different methods used to perform surveys of the seafloor & the bottom of various water bodies. Plus, learn how ROVs are a useful tool to underwater studies.
For effective coverage, both mechanical and side-scanning sonar systems should follow the "10% rule," achieving around 70% seabed coverage. This rule suggests that the sonar's altitude should be 10% of its range. For example, if the range is set to 10 meters, the sonar should be positioned 1 meter above the seabed; for a 20-meter range, the altitude should be 2 meters.
While there are several guidelines in sonar usage, the 10% rule is one of the most reliable.

Similar to how visible light creates shadows, objects in sonar imaging cast "acoustic shadows."
When the sonar is positioned at a steep angle and high altitude, shadows are shorter and harder to distinguish, making object assessment more challenging. A lower altitude and shallower angle create longer shadows, aiding in better object detection.
Objects farther from the sonar cast narrower shadows due to beam geometry, with shadow width increasing as the sonar approaches. Wider shadows, however, can obscure other nearby objects, as these areas receive no direct acoustic signal. When inspecting crowded areas, adjusting to a steeper angle and higher altitude for shorter shadows improves object distinction.

As demonstrated in earlier sections, sonar systems often illuminate objects at an angle, displaying only surfaces and edges that are closer to the system. Surfaces directly facing the sonar will produce the strongest echoes, while angled surfaces will deflect acoustic waves away from the system, reducing echo clarity.
These principles apply broadly to large environments. For example, when inspecting boat hulls or dock fingers, sonar reveals prominent features within the direct line of sight as bright returns, while obscured areas appear as shadowed zones with no return.
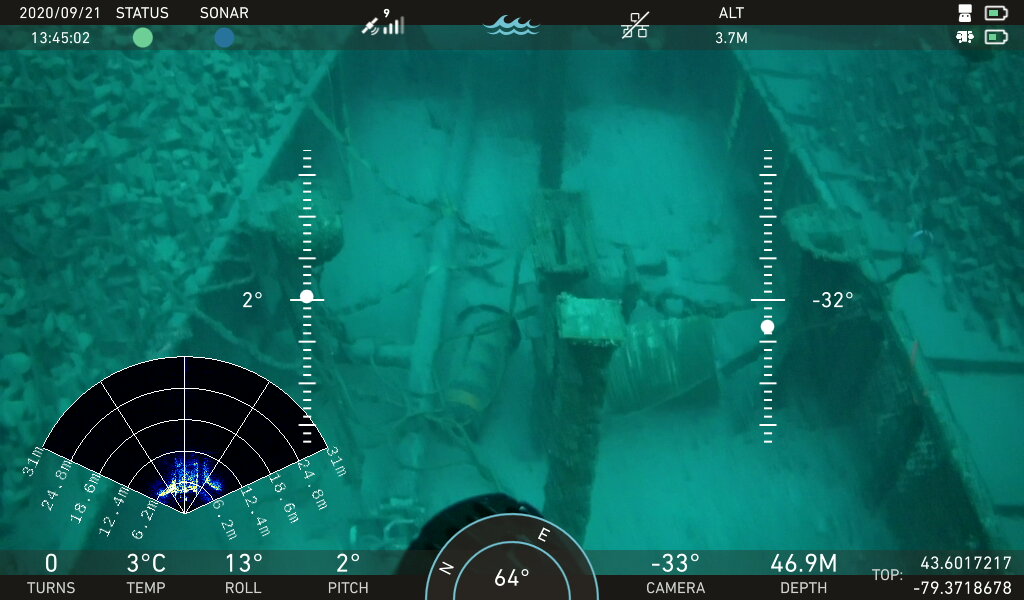
While sonar systems offer a unique approach to acoustic interpretation, they are particularly valuable when mounted on an ROV. Without sonar, an ROV pilot must rely solely on visual feedback from a camera, which can be limiting in low-visibility conditions, often with a reduced range of view that can be less than a meter.
Sonar significantly extends detection range, allowing the pilot to detect objects from further away. Instead of going over the seabed to find objects, the ROV can remain stationary and scan the entire environment. This approach allows the pilot to gain a clear understanding of the area, including the locations of man-made structures, natural features, and areas to avoid.
However, due to the low mass of ROVs, they are prone to unintended vertical and horizontal movement. For sonar imaging, any ROV shift during the transducer’s rotation can smear the image. To minimize this, narrowing the scan plane or positioning the ROV on the seafloor can help increase refresh rate and improve image clarity. When interpreting the sonar display, it’s essential to understand relative bearings, with objects positioned according to clockwise angles from 000 degrees R, allowing for precise readings.
Using 3D Sonar SLAM, ROVs like SPECTRA can maintain precise positioning even in GNSS-denied environments, mitigating the effects of currents and drift during inspections.
A polar scan encompasses a full 360-degree continuum, making it ideal for gaining environmental awareness around the ROV, especially in low-visibility conditions.
A sector scan is defined as any scan that covers less than a full 360 degrees. These scans are effective for improving the refresh rate while imaging the environment or tracking an object. However, the drawback of using a sector scan is that it may result in a loss of visual information from the areas behind or to the sides of the scanned sector.

Sonar can be used to locate targets in the water column or on the seabed. However, effectively utilizing the sonar system to find objects, especially small ones, requires practice.
To optimize object detection with an ROV, it is essential to maneuver slowly, allowing for the generation of clear sonar images without smear. The first step is to position the ROV on the bottom or in a stable orientation.
Once stable, initiate a polar scan to capture a comprehensive view of the surroundings. Following this, calculate the relative bearing to the target object. The ROV should then be aligned with the object at a zero bearing.
Next, employ a sector scan, narrowing the angle to about 90 degrees to improve the refresh rate of the images. Finally, maintain contact with the target using sonar as the ROV follows its movement.
For complex underwater inspections, creating high-resolution orthomosaics with SoundTiles software enables users to achieve precise, large-scale visual mapping. Orthomosaics are composite images generated from multiple sonar or camera captures, stitched together to create a continuous, top-down view of a surveyed area. This technique provides a cohesive, detailed visual reference, invaluable for monitoring asset condition, tracking changes over time, or mapping expansive underwater structures.
SoundTiles software, which integrates with Deep Trekker ROVs, automates the generation of these acoustic mosaics by piecing together sonar images captured during inspection. Using SoundTiles, operators can create a seamless, geo-referenced map, which is particularly beneficial for inspecting infrastructure like dams, tunnels, and ship hulls where a comprehensive view is crucial.
Key Benefits of Orthomosaics and SoundTiles Integration:
Enhanced Visualization: By combining multiple sonar captures into a single, high-resolution image, orthomosaics offer a detailed view of expansive or hard-to-navigate underwater areas.
Improved Accuracy: SoundTiles software accounts for variations in sonar data, aligning images precisely to produce a highly accurate spatial representation.
Change Detection: For routine inspections, orthomosaics serve as baseline references, allowing operators to compare images over time and identify any emerging structural issues.
Combined with 3D Sonar SLAM, SoundTiles can generate not only 2D orthomosaics but also 3D spatial reconstructions, improving defect analysis and inspection reporting.
Through the integration of SoundTiles with Deep Trekker ROVs, users can leverage orthomosaics for meticulous monitoring, enabling a comprehensive view that surpasses what individual sonar or visual captures can offer on their own.
Each type of imaging sonar has its unique strengths, allowing researchers and marine experts to gain a comprehensive understanding of the underwater world. These technologies play critical roles in ocean exploration, marine conservation, and various industries that depend on accurate underwater mapping and imaging.
Let's take a look at some examples:
Bathymetry is the study of the "beds" or "floors" of water bodies, including oceans, rivers, streams, and lakes. Sonar is used on ships to measure the depth of the ocean floor, enabling safe navigation. This technology is also responsible for the depth readings found on nautical charts.
3D sonar on ROVs like SPECTRA allows operators to generate high-resolution volumetric maps of the seafloor, capturing both depth and structural details in real time. SLAM algorithms maintain accurate vehicle positioning, even in areas without GPS, improving survey efficiency and reducing the need for repeated passes.
Pipeline inspections can be difficult in murky water with high-frequency sonar. Gas and oil companies use sonar to identify damage, spans, and rock dump integrity.
SPECTRA equipped with 3D Sonar SLAM can map pipelines in GNSS-denied and turbid environments. Point clouds provide precise measurements of spans, sediment accumulation, and potential damage, while real-time navigation ensures full coverage without relying solely on operator memory or post-processing.

Sonar is also used for detecting unexploded ordnance (EOD) and conducting mine countermeasures (MCM) underwater. As seafloors are increasingly exploited, it becomes essential to identify cables, pipes, and potential hazards. Locating unexploded bombs, mines, and torpedoes is critical for safety. Sonar systems are also integrated into submarines and ships for underwater communication. Commonly, side-scan sonar, either towed or boat-mounted, is used to scan large areas for anomalies. Once detected, an ROV equipped with imaging sonar is deployed to re-identify and approach the target to confirm if it's an explosive.
3D sonar enables volumetric imaging of suspected ordinance or minefields. With SLAM-assisted positioning, SPECTRA can track its path accurately, creating detailed maps of potential hazards while minimizing human exposure in dangerous conditions.
Sonar technology is often used during Search and Recovery missions to make it easier and more efficient to locate evidence or victims of boating accidents or potential drownings in unclear waters. Side-scanning systems help locate bodies and guide the divers to the site of the recovery. ROVs with imaging sonars offer a safe alternative to verify and recover the victim instead of divers.
ROVs with 3D sonar provide operators with comprehensive point cloud models of underwater search sites. Real-time 3D visualization allows faster identification of objects or evidence, while SLAM ensures accurate spatial mapping, even in complex or low-visibility environments.

Sonar technology also has the ability to help locate underwater objects in deep salvage operations where murky waters may hinder camera visibility. Identifying a shipwreck or other large structure from up to 200m (656’) away isn’t a stretch for some ROV-mounted imaging sonars.
SPECTRA’s 3D Sonar SLAM creates detailed structural models of wrecks or submerged assets. Operators can inspect and measure features precisely, track changes over time, and plan salvage operations with full spatial awareness, even in currents or murky conditions.
Powerful sonar systems are used for the assurance of safe installation of wind turbines. These sites must be subject to survey with great accuracy to ensure the foundation of the turbine is secure in the water.
3D sonar mapping supports turbine foundation inspections, cable routing verification, and environmental assessments. SLAM-assisted ROVs maintain accurate navigation around complex structures, ensuring thorough inspection and reducing reliance on repeated site visits.
Inspecting large structures like bridge pilings, dock piers, quay walls, and dams can be challenging due to their size, making it difficult for divers or ROV cameras alone to provide a comprehensive view. Sonar offers a wider perspective, enabling inspectors to better assess the structure, identify major defects, and track changes over time by comparing results with previous sonar surveys.
Dams, tunnels, quay walls, and bridge pilings benefit from 3D Sonar SLAM, as operators can capture complete volumetric models of structures. SPECTRA ensures full coverage while navigating around confined spaces, currents, or difficult-to-access areas. The generated point clouds can be integrated with SoundTiles software for orthomosaic generation and structural assessment.
The addition of sonar technology is invaluable to underwater discovery and research by helping academics and researchers to monitor aquatic life or environmental conditions below the surface.
3D sonar provides precise volumetric mapping for ecological studies, habitat monitoring, and sediment analysis. With SLAM, SPECTRA maintains accurate positioning in areas inaccessible to GPS, supporting long-term monitoring and detailed scientific data collection.

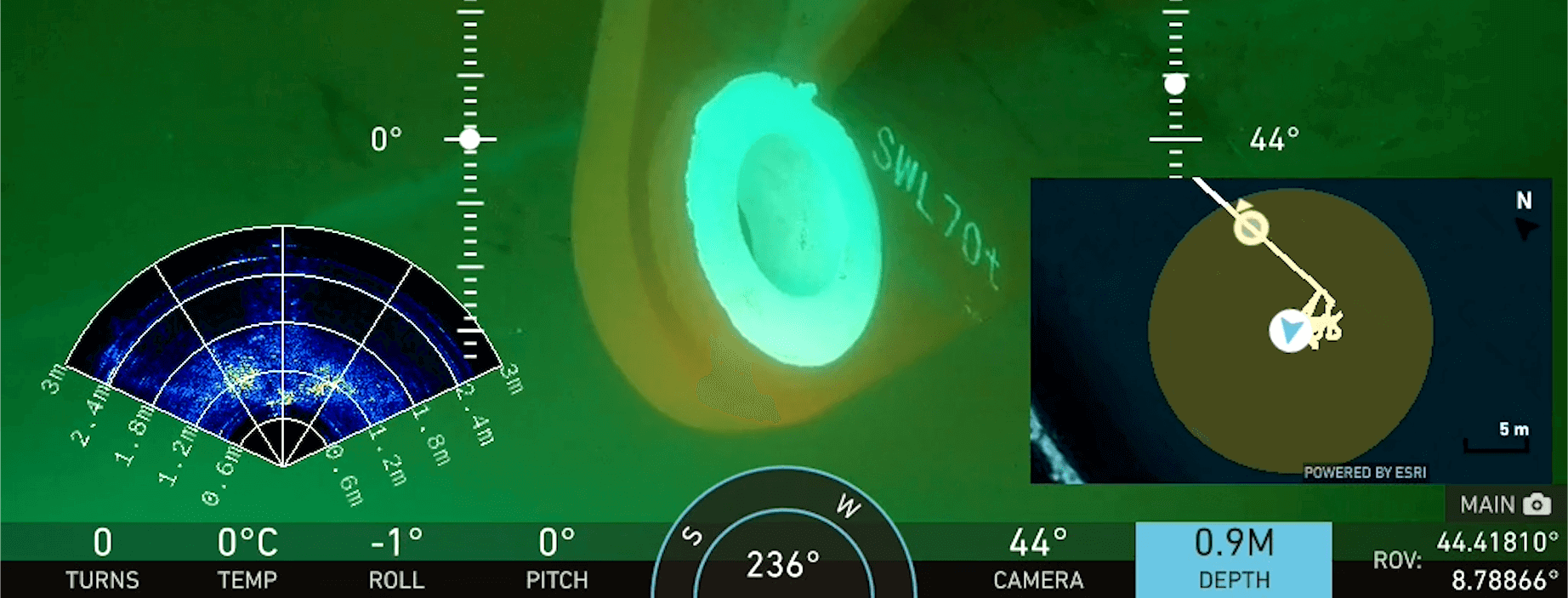
2D imaging sonars are an excellent option for various applications. By sending out hundreds of beams within a 120-degree horizontal and 20-degree vertical band, they produce higher image quality compared to single-beam, sector-scanning sonar. This type of sonar is featured in the channel survey video at the beginning of the article, as well as in the tunnel inspection video directly above.
Get answers to your sonar questions here.
First, a device emits sound waves from a transducer into the water. When these waves hit an object, they bounce back as echoes. The system measures the time it takes for the echo to return, allowing operators to calculate the distance and location of underwater features or objects.
There are several types of underwater sonar.
Underwater sonar is crucial for ROV operations because it provides reliable navigation and object detection in environments where cameras may be ineffective. Sonar systems help ROV pilots identify obstacles, measure sediment levels, and locate targets even in zero-visibility water.
With a foundational understanding of sonar systems and their applications, you're well on your way to determining whether sonar technology suits your needs. There's no rush to make a decision; taking the time to conduct further research will only benefit you.

Sonar systems come in various types and can be integrated with a range of tools, software, robots, and vehicles. Given the broad applications of sonar in sectors such as offshore, energy, infrastructure, defense, commercial diving, municipalities, maritime operations, ocean science, and underwater exploration, it's important to understand the specifics of what you're considering.
By adding sonar, you can significantly enhance your ROV's ability to detect hidden objects that might otherwise evade detection by a camera system. These attachments allow for both side and forward scanning capabilities.
If you're interested in learning more about sonar or you would like to consult about the appropriate system for you, get in touch with us and we will happily accommodate your needs.

March 17th, 2026
Two-day AIMS training program teaches SAR teams how to integrate sonar...
March 11th, 2026
Deep Trekker’s SPECTRA ROV integrates 3D Sonar SLAM, 4K stereo vision,...

November 3rd, 2025
At REPMUS 2025, Deep Trekker’s ROVs validated real-world mine countermeasure capabilities...