Request a Quote
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
One of the beauties of my job is the fact that I get to learn so much about the different industries that we work in. We are always doing our best to learn everything about the industries that use our ROVs so that we can continue to develop our products to suit the needs of those who are using them. This is fantastic for us because not only are we experts in ROVs but we strive to be experts in the industries such as oil and energy, aquaculture, commercial diving, municipal infrastructure and more.
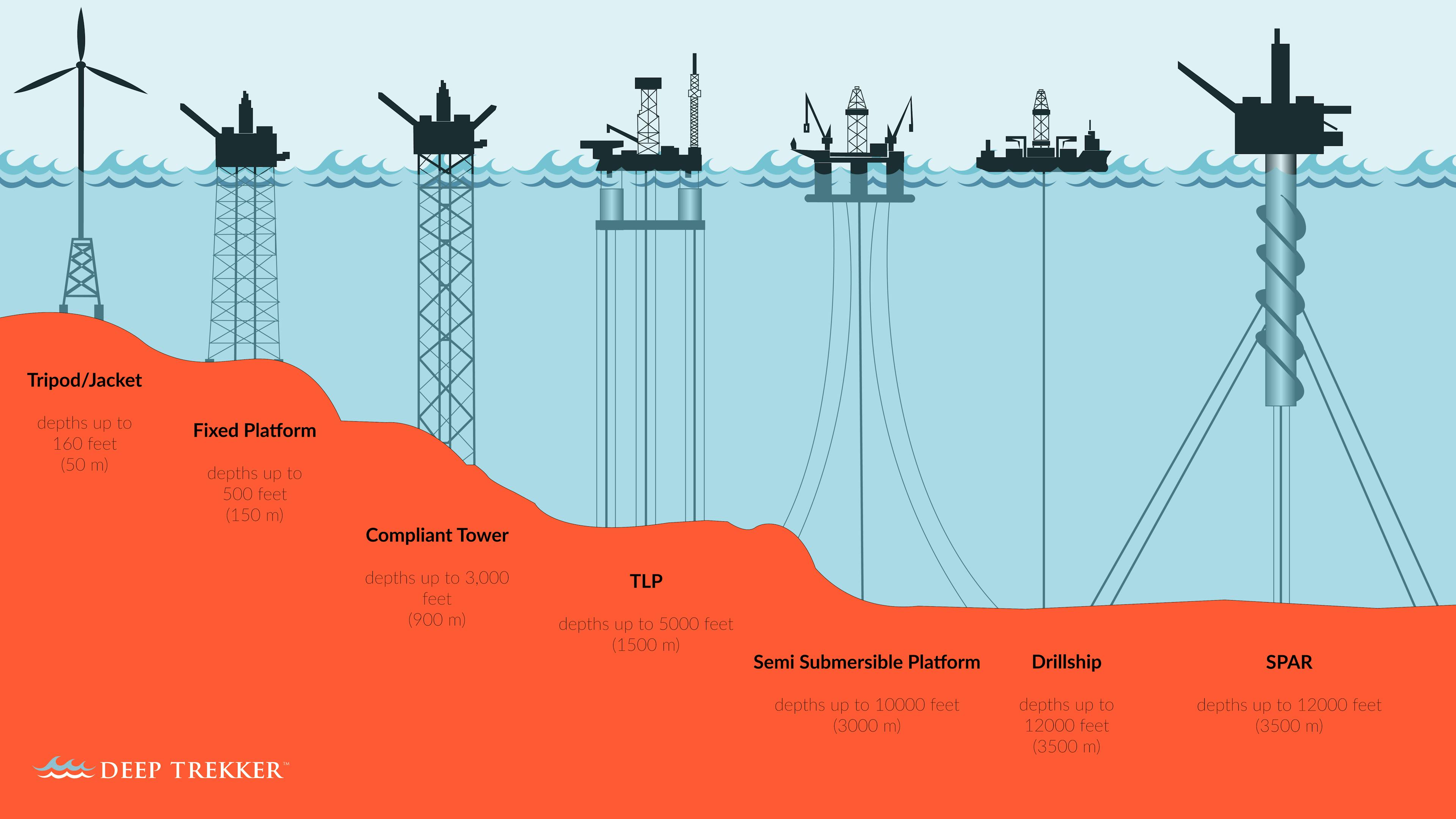
In this post I am going to do an overview of the various kinds of oil rigs and platforms that exist and where the use of mini-ROVs fit into each. Even though mini ROVs are not used as often as work class ROVs in the offshore energy industry, mini ROVs still play a vital role in on-going inspections and maintenance. While there are some larger structures that have fewer uses for micro-ROVs, the majority of oil rigs and platforms have many potential areas for mini-ROV inspection. After doing my own research and speaking to various industry professionals I have learned that depending on the type of energy structure, the uses for a mini-ROV can range from inspecting the entire underwater structure to doing on board system inspections.
First off, I need to differentiate between the two main types of offshore oil drilling structures. There are moveable structures and there are fixed structures. As their names indicate, moveable structures are portable and fixed structures are fixed in a specific area.
These Structures are used mostly for inland and shallow water drilling. They are used in lakes, swamps, rivers and canals. They consist of large, floating platforms that are towed from location to location with the use of a tug boat. They are unable to withstand the water movements that other structures do in large open water areas.
Since these structures are used mainly in shallower water, the mini-ROVs can be used to inspect all aspects of these structures. Using a mini-ROV like the Deep Trekker DTG2 or DTX2 offers an inspection solution so that operators can check out their risers (the piping component that is used for exporting oil and gas from the seabed), the hull of the platform and topside components such as water tanks (used for storing water) that are located on the deck of the platform.
These structures are similar to drilling barges in that they can be moved from location to location. What differentiates these structures are that once they are towed to the correct drilling site, three or four “legs” are lowered until they rest on the bottom floor. This actually allows the working platform to sit above the water as opposed to a floating barge. These systems are also suitable for shallower waters since extending the legs too deep is not practical. Since their working platform is elevated above the water, these structures are generally safer to operate than drilling barges. Mini-ROVs can be used to inspect the underwater infrastructure, such as the jackup legs and risers, of these structures.

First off, the ROVs can be used to inspect the inside and outer areas of the submerged hull. Regular inspection of these hulls is a very important task when operating a semi-submersible rig due to the possibility of fatigue and cracking of braces. Of course, the mini-ROVs can also be used for any onboard water and/or cooling tanks.
Not only can the ROV be used to perform hull inspections of the structure, but a mini-ROV can be used to inspect the moon pool that larger work class ROVs are unable to reach. Lastly, and possibly the most important use of a mini-ROV is the ability to inspect the underside motors that are integral to holding the ship in place.
Ask us about using a ROV to inspect the risers, hull and water tanks on your offshore platform
On these structures ROVs such as the DTX2 can be used to inspect the underwater infrastructure when the structure is not too deep. Units such as the DTG2 can be used to inspect onboard water tanks.
In addition to the 9 rig and platform structures discussed above there are also structures like Subsea systems, Spar platforms and Compliant Tower Platforms that are used in much deeper water and typically do not have many underwater uses for mini-ROVs. That being said most rigs do have water tank and cooling tank components that can be effectively inspected with a mini-ROV.
As you can see, there are a number of applications and types of structures that could benefit from having a min-ROV on board. In some of the shallower structures, a mini-ROV can actually be an efficient alternative to purchasing an expensive and larger work class ROV.
Resources used:
http://large.stanford.edu/courses/2014/ph240/liegl2/docs/sadeghi.pdf
http://www.slideshare.net/rahulranakoti/offshore-platformdesign
January 29th, 2024
Deep Trekker's strategic expansion into the UK & Ireland market reflects...
October 5th, 2022
Inspecting turbine blades is critical to plan maintenance and avoid downtime....
April 19th, 2023
Our Certified Service Partner in Norway, ROVpartner came to visit us...