Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
2D sonar mosaic mapping offers an essential solution for underwater inspections in low-visibility environments, where traditional imaging methods fall short. By combining underwater ROV technology with advanced sonar processing software, teams can capture, stitch, and analyze detailed mosaics of underwater structures like dam walls, canals, and tunnels.
This article provides an in-depth look at how ROVs equipped with 2D sonar can achieve precise mapping and measurements, supporting asset maintenance and environmental monitoring.
Read our article about sonars to learn what the technology is in more detail
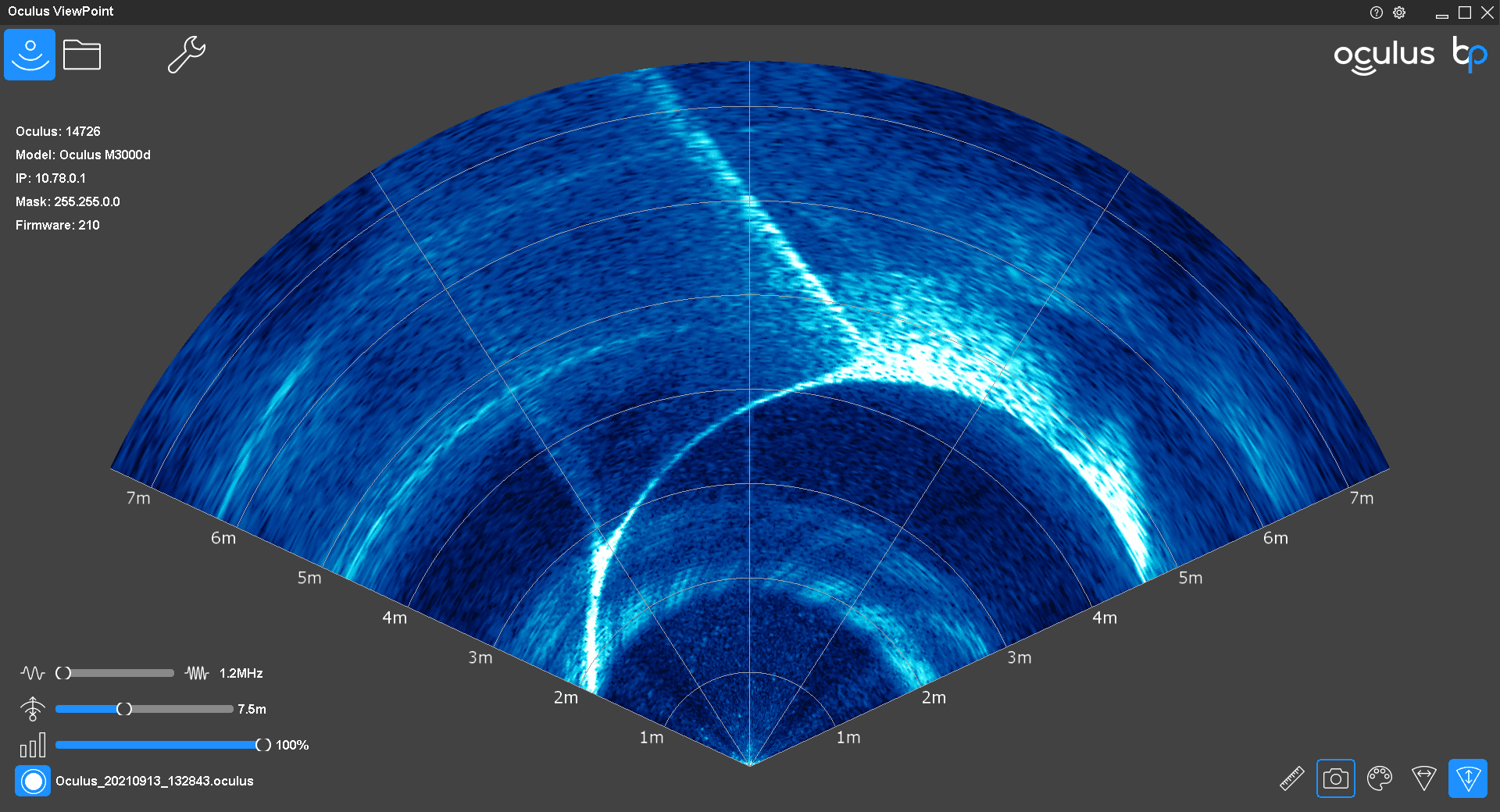
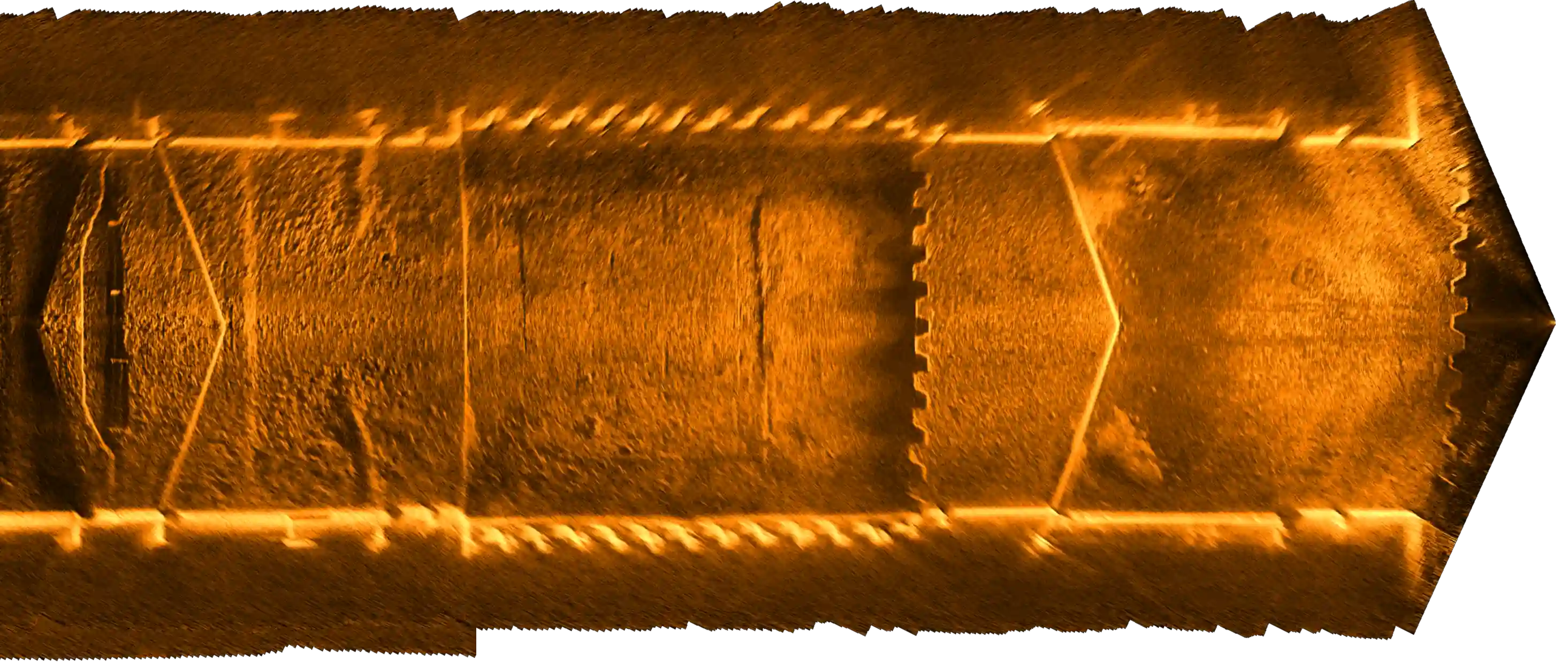
2D sonar mosaic mapping assembles multiple sonar images into a single, cohesive view of an underwater area. This process stitches overlapping sonar data to create an accurate "orthomosaic" of submerged structures, allowing for a clear, scaled image of large areas in low-visibility conditions.
Widely used for inspecting assets like dam walls, canals, bridge piers, tunnels, and pipelines, 2D sonar mosaics provide high spatial accuracy for precise measurements, helping to assess structural integrity, sediment buildup, or invasive species. By comparing mosaics over time, operators can monitor changes and make informed maintenance decisions.
Underwater ROVs offer mobility, precision, and safety for 2D sonar mapping, reaching depths and confined areas that would be hazardous or inaccessible for divers. Combining underwater ROV flexibility with sonar technology enables operators to capture detailed, high-resolution data from complex structures and environments, all while keeping personnel safe.
As Blake Hutchings, Deep Trekker Technical Trainer, explains:
"Two-dimensional sonar mosaic mapping holds great potential across various fields, including search and rescue operations.
This technology allows pilots to map confined spaces that are inaccessible to boats equipped with traditional side-scan sonar. By utilizing forward-looking multibeam sonar (FLS) in conjunction with mosaic building software, pilots benefit from enhanced situational awareness in real time while simultaneously generating a comprehensive 2D mosaic for detailed post-mission analysis.
This approach significantly improves the chances of successful recovery efforts, as even small bodies of water can be thoroughly examined using familiar techniques (similar to side-scan).
By integrating this technology into search and rescue workflows, responders can operate more efficiently, saving valuable time and resources in critical situations."

These features make an underwater ROV an essential tool for 2D sonar mapping, providing both flexibility and high-quality results for underwater inspections.
Discover how sonar makes search and recovery missions safer and effective, and explore the benefits of integrating Deep Trekker ROVs with side-scan sonar.
Sonar mapping software converts raw sonar data into a cohesive 2D mosaic by stitching overlapping images collected by an underwater ROV. This process aligns and corrects for any movement or angle variations, producing a detailed, accurate map of the inspected area for easy analysis.
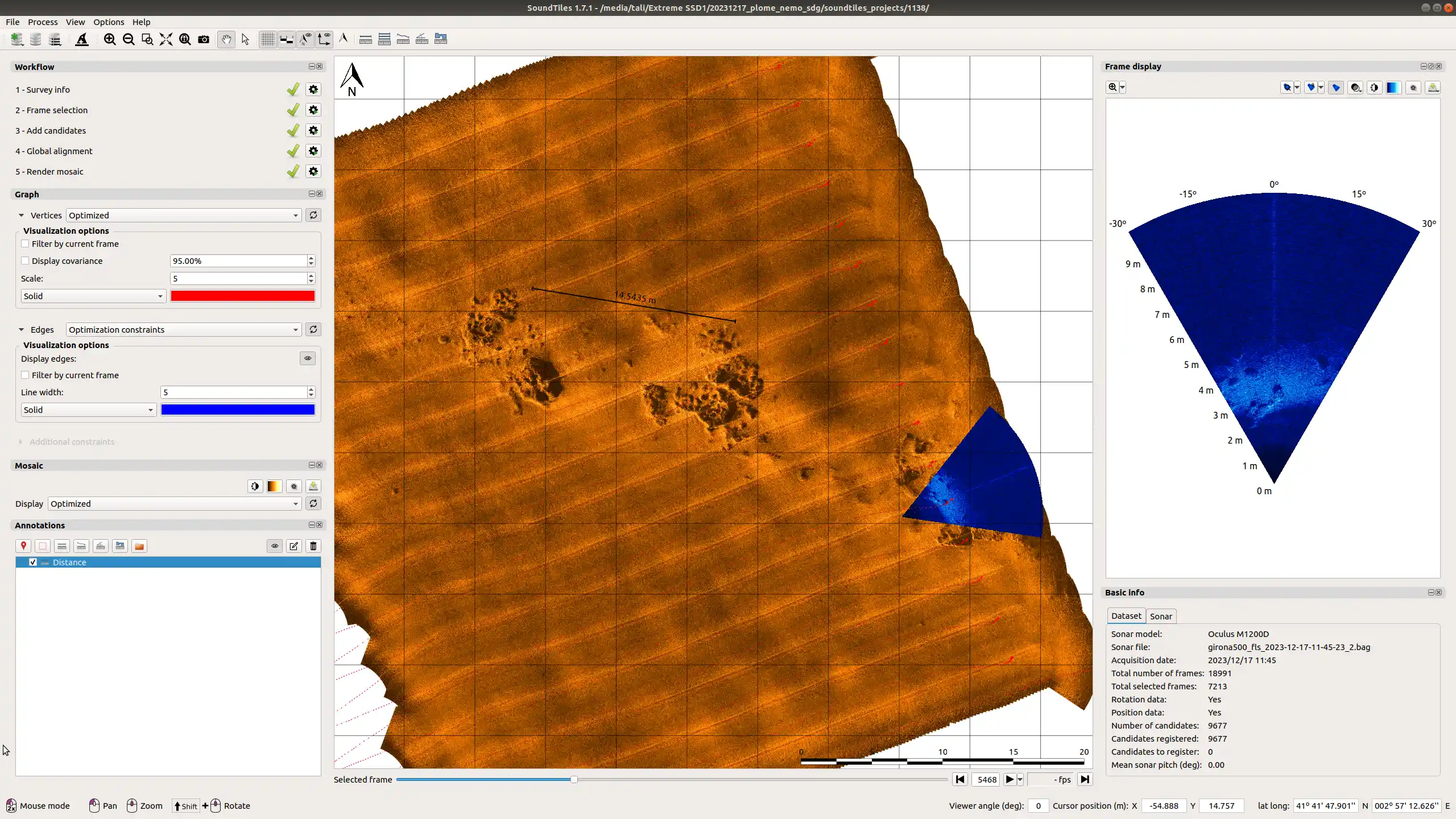
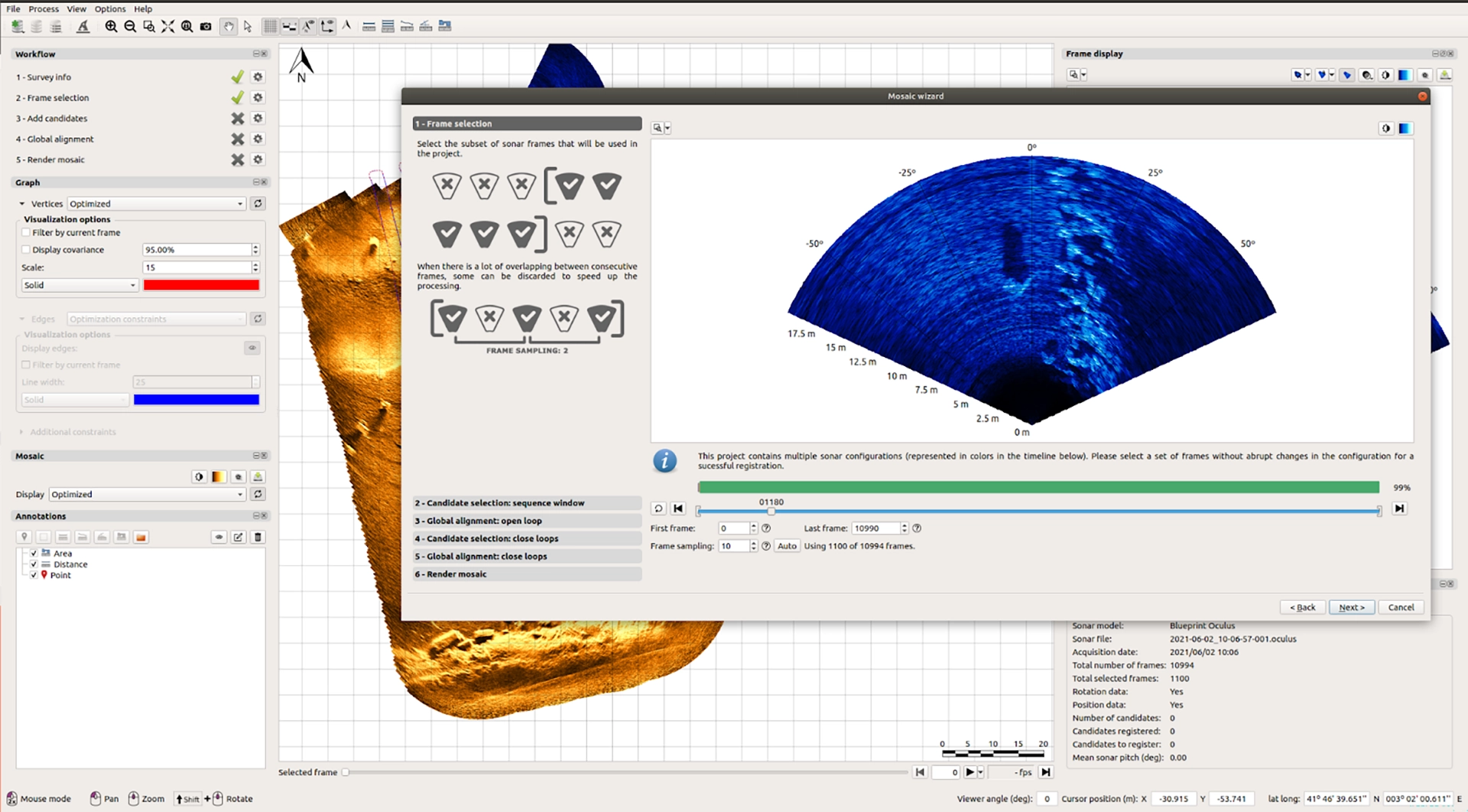
SoundTiles is specialized software for transforming sonar data into high-resolution 2D mosaics. It uses advanced algorithms to align and stitch sonar images, enabling users to create an overview map of the inspected area. Compared to reviewing the sequence of individual sonar images, this approach provides a clearer understanding of the spatial arrangement of surveyed elements while simultaneously enhancing the signal-to-noise ratio of the data.
SoundTiles algorithms can align the sonar images based on their content without relying on positioning data from the acquisition platform to place the images on the map. This reduces the need for expensive positioning systems on the acquisition platform and enables the creation of mosaics for vertical walls or structures.
This tool is widely used for inspecting challenging underwater environments like dams, canals, tunnels, and other infrastructure where visual clarity is limited.

Sonar mapping software like SoundTiles costs around €11,000 . This investment is valuable for organizations needing detailed, routine inspections or data for asset management. The software’s capabilities - high-quality 2D mosaics, advanced analysis, and seamless underwater ROV integration - enhance underwater survey efficiency and data usability.
Creating a 2D sonar mosaic with an underwater ROV involves several key stages, from planning the inspection dive to analyzing the processed data. Each step is crucial to ensure the quality and accuracy of the final mosaic, and it requires careful coordination between the ROV, sonar equipment, and software used for processing the footage.
1. Planning the Inspection
The success of a 2D sonar mosaic begins with thorough planning.
2. Equipment Setup
Once the inspection plan is established, the next step is setting up the necessary equipment.

3. Data Capture
With everything in place, the inspection dive begins. The primary goal during this stage is to capture consistent, high-quality sonar data.
4. Processing the Footage
After the data capture phase, the next step is processing the sonar footage using specialized software like SoundTiles:
5. Analysis
Once the sonar mosaic is completed, the final step is to analyze the data.
By following this step-by-step process, ROVs and sonar mapping software provide an effective and efficient way to inspect, monitor, and maintain underwater structures with precision and accuracy.
Need an ROV for submerged infrastructure inspections?
High-quality 2D sonar mosaics require attention to sonar alignment, underwater ROV stability, and environmental factors to ensure clear, accurate results.
1. Sonar Operation: Maintaining Consistent Angles
When using sonar for 2D mapping, keeping the sonar at a steady distance and angle increases the chances of a good image alignment during the processing and reduces distortions in the final output.
2. ROV Operation: Ensuring Steady and Controlled Movement
The effectiveness of sonar mapping largely depends on the stable and controlled operation of the underwater ROV. The ROV must be able to move smoothly and steadily along the inspection path to ensure consistent sonar data capture.
3. Environmental Conditions: Adapting to Underwater Variables
Environmental factors such as water clarity, currents, and temperature can all affect the performance of both sonar systems and ROVs during mapping operations.

4. Lighting and Visibility
In environments where there is limited natural light, especially at greater depths, operators may rely on artificial lighting to help with ROV maneuvering. However, excessive lighting at depth can create glare, so adjust lighting to avoid interference.
5. Sonar Frequency and Resolution
Higher frequencies yield higher resolution but have a shorter range, suitable for detailed inspections. Lower frequencies cover greater distances but with lower detail.
Discover how ROVs equipped with imaging sonar inspect underwater structures like tunnels, dams, and bridges, ensuring structural safety and precision.
At H2O Drones, sonar mosaic mapping is a core component of nearly every inspection. Niels Kruize emphasizes its importance: "We do a lot of sonar mapping - almost every inspection. If the customer wants it, we just do it." The method is particularly effective for visualizing underwater assets like floors, sluices, and pipelines.

Kruize describes the process as straightforward:
"You just swim through it with your underwater ROV and sonar capturing data, render the images with software, and it's done."
Given the Netherlands' extensive waterways, this approach has become essential for H2O Drones.
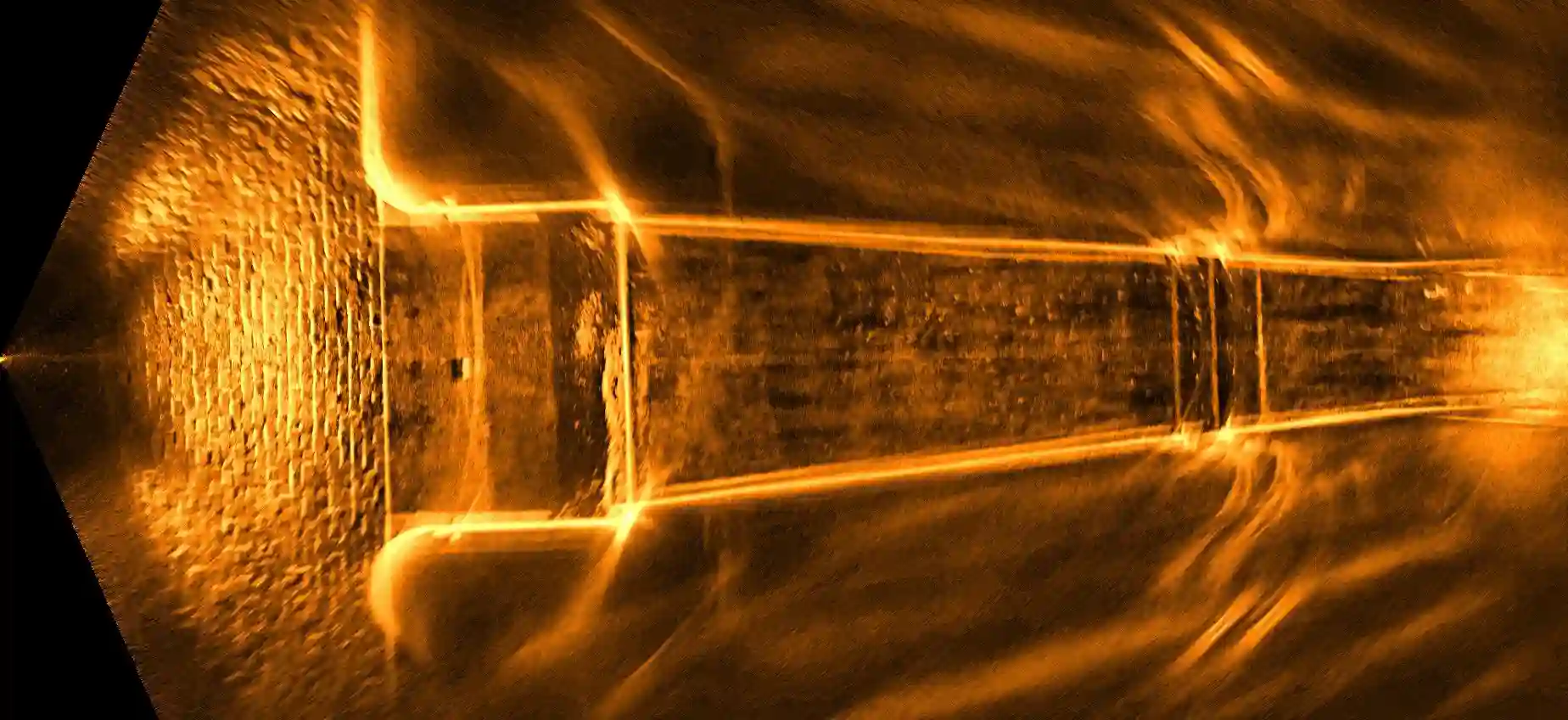
One of the most impactful applications of sonar mapping has been in sluice inspections, where H2O Drones examines the floors of these water control structures for potential blockages or damage.
"We use sonar to inspect the floors of the sluice to see if there are any objects that might obstruct the doors," Kruize explains. "Or maybe there’s damage done by ships when they’re stationary and propelling water. You get little points of erosion from the constant flow, and that could really damage the overall structure." Mapping out these areas with Deep Trekker ROVs and software creates highly detailed visuals.
"It’s crystal clear when we go down there with an ROV equipped with sonar," he says. "You can see if there’s damage - it’s a big advantage for us."
For Kruize, one of the major benefits of sonar mapping is its effectiveness in communicating findings to clients. "It’s the bridge of communication between a customer that isn’t familiar with sonar reading and someone who is," he explains. "For an operator, it’s simple: you can just say, ‘Well, there’s a problem here, and here, and here.’ With sonar orthomosaics, it’s like having a detailed image, which makes it really easy to translate our inspections into a report."
However, Kruize notes that achieving high-quality sonar images requires a structured and precise approach: "It’s trial and error all the way. You have to keep really still and map out where you’re going. If you go too far to the right, it can create issues because the frames render as one." Fortunately, the software includes corrective features that help address these errors:
"Even if you make a little slip-up, it corrects itself. That’s the technology - it’s almost too easy to work with."
Sonar mapping can be more challenging in high-current environments or areas with bubble interference, which can create "a lot of static" in the sonar image. "If you go through bubbles with sonar, it’s hard for the program to create a solid picture," Kruize explains. To work around this, the team has developed techniques to reduce the impact of bubbles, such as adjusting the ROV navigation and sonar path to avoid them. "It’s all about trial by error, but we’ve found a way that works."
When it comes to choosing equipment for these complex inspections, Kruize and his team rely heavily on the Deep Trekker REVOLUTION ROV.
"The REVOLUTION is the top favorite for our inspectors because it’s a jack-of-all-trades," he says. "It’s sturdy, strong, and the head of the ROV can turn in a lot of directions. You don’t have to worry as much about positioning."
This flexibility is particularly beneficial for complex inspections where multiple angles are needed, allowing H2O Drones to capture comprehensive images without constantly repositioning the ROV. With its reliable technology and adaptable design, the REVOLUTION has become H2O Drones’ go-to solution.
"It’s not a long process anymore," Kruize notes. "We’ve done it so many times now, we can do it really fast with high quality. The more we’re doing this, the better the quality will be."
The accuracy of 2D sonar mapping depends on several factors, including the quality of the sonar equipment, the operational conditions, and the level of operator expertise. When all factors are optimized, 2D sonar mapping can achieve impressive levels of accuracy, particularly when creating mosaics for inspections of submerged infrastructure such as dam walls, tunnels, or pipelines.
In ideal conditions, 2D sonar mapping can achieve accuracies within a few centimeters, which is sufficient for many asset inspection tasks. However, challenging conditions such as poor sonar calibration or operator error can reduce the final accuracy.
Yes, but the effectiveness of sonar systems in such conditions can vary depending on the specific technology being used. High turbidity refers to waters with a high concentration of suspended particles, which can reduce visibility and potentially interfere with sonar signals.
While high turbidity can present challenges, 2D sonar mapping remains a reliable option for collecting data in these environments, provided the sonar system is properly configured and calibrated to handle such conditions.

Selecting the right underwater ROV for 2D sonar mapping depends on the specific needs of the project, including the size and depth of the inspection area, the type of sonar system to be used, and the operational requirements. Not all ROVs are designed to carry the heavy sonar equipment required for detailed 2D mosaics, so it's crucial to choose a model with suitable capabilities.
When selecting an ROV for 2D sonar mapping, it's essential to assess these factors and choose a model that can handle the required equipment, offer maneuverability in various underwater environments, and meet the specific depth and operational needs of the inspection.
Popular models for sonar mapping include the Deep Trekker REVOLUTION and the PIVOT, both of which provide flexibility and robust functionality for sonar-based inspections. These Deep Trekker ROVs can rotate the sonar to face upward or downward, enabling operators to capture detailed images of vertical walls or other hard-to-reach areas. This flexibility is crucial for creating high-quality mosaics of vertical surfaces, which no other ROVs with fixed downward-facing sonar units are capable of.

2D sonar mosaic mapping with an underwater ROV represents a practical solution for capturing detailed, measurable images of underwater assets in low-visibility environments. By combining advanced sonar technology with Deep Trekker ROVs’ versatility, operators can create comprehensive 2D orthomosaics of structures like dam walls, canals, tunnels, and pipelines, supporting long-term maintenance and inspection efforts.
Using tools such as SoundTiles software, this approach allows engineers and inspectors to visualize and analyze inspection data in a streamlined format, offering valuable insights over time. Through detailed case studies like those from H2O Drones, we see how real-world applications of 2D sonar mapping meet industry demands for reliable, clear, and scalable underwater inspection solutions.
For more information on 2D sonar mosaic mapping or to discuss how Deep Trekker ROVs can enhance your operations, please reach out to our team.

March 17th, 2026
Two-day AIMS training program teaches SAR teams how to integrate sonar...
March 11th, 2026
Deep Trekker’s SPECTRA ROV integrates 3D Sonar SLAM, 4K stereo vision,...

November 3rd, 2025
At REPMUS 2025, Deep Trekker’s ROVs validated real-world mine countermeasure capabilities...