Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now

Frontier Subsea recently completed an innovative offshore project integrating the Deep Trekker PIVOT ROV with a host work-class ROV to perform a confined-space inspection inside a subsea pipe within a production platform.
This operation demonstrated the feasibility and advantages of combining a compact, high-thrust inspection-class ROV with a work class vehicle, enabling access to previously inaccessible areas and providing high-quality visual and sample data.
The success of this deployment establishes a repeatable model for future offshore inspections requiring confined-space access in difficult locations.
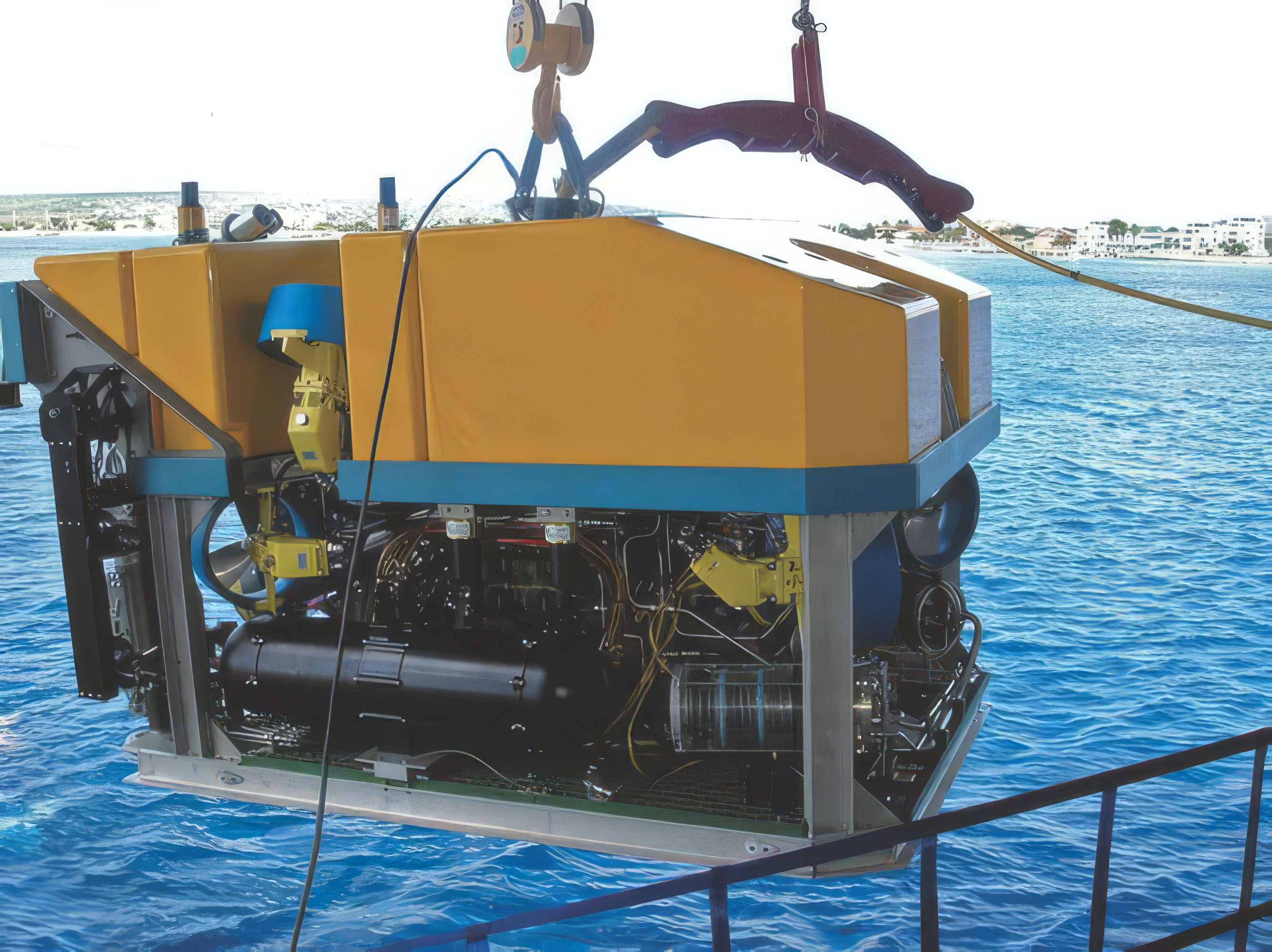
Work class ROVs are typically deployed for high-capacity subsea inspection, intervention, and maintenance operations. These vehicles are quite large and require additional vessels, crews, and cranes to operate and transport. They are capable of working in harsh offshore environments, supporting tools for manipulation, sampling, and high-resolution imaging.
Frontier specializes in customizing ROV deployments for specific subsea challenges, often integrating specifically tailored tooling to extend capabilities beyond standard inspections.
"We do a lot of bespoke ROV tooling solutions,” noted Andrew Moores, Project Execution Manager at Frontier. “We are a problem-solving, solution-based company. One of our clients came to us and said we need to figure out a way to do an inspection inside of a piece of pipe that's inside the platform."
In offshore operations, conventional inspection-class ROVs are often unsuitable for subsea conditions. Deploying such systems over the side of a vessel, particularly 350 kilometers offshore in high seas, poses operational challenges including vessel motion, tether handling, and launch/recovery safety. Frontier’s solution was to leverage a work class ROV as a host vehicle, enabling subsea deployment of a smaller inspection ROV to the work site:
"That's why we came up with this method to be able to use a work class ROV as the host vehicle and then get our system down to depth and then to be able to deploy it just adjacent to the point where we need to do the inspection."
This methodology allows the work class ROV to transport the smaller vehicle through the splash zone, provide stability in high-sea conditions, and serve as a command and control interface for the inspection ROV.
Deep Trekker Launches A New Class of High-Performance Inspection ROV
Integrating the Deep Trekker PIVOT ROV with the host work class ROV required both mechanical and electrical innovation. The primary challenge was establishing a secure docking and deployment system while maintaining full telemetry and power transmission.
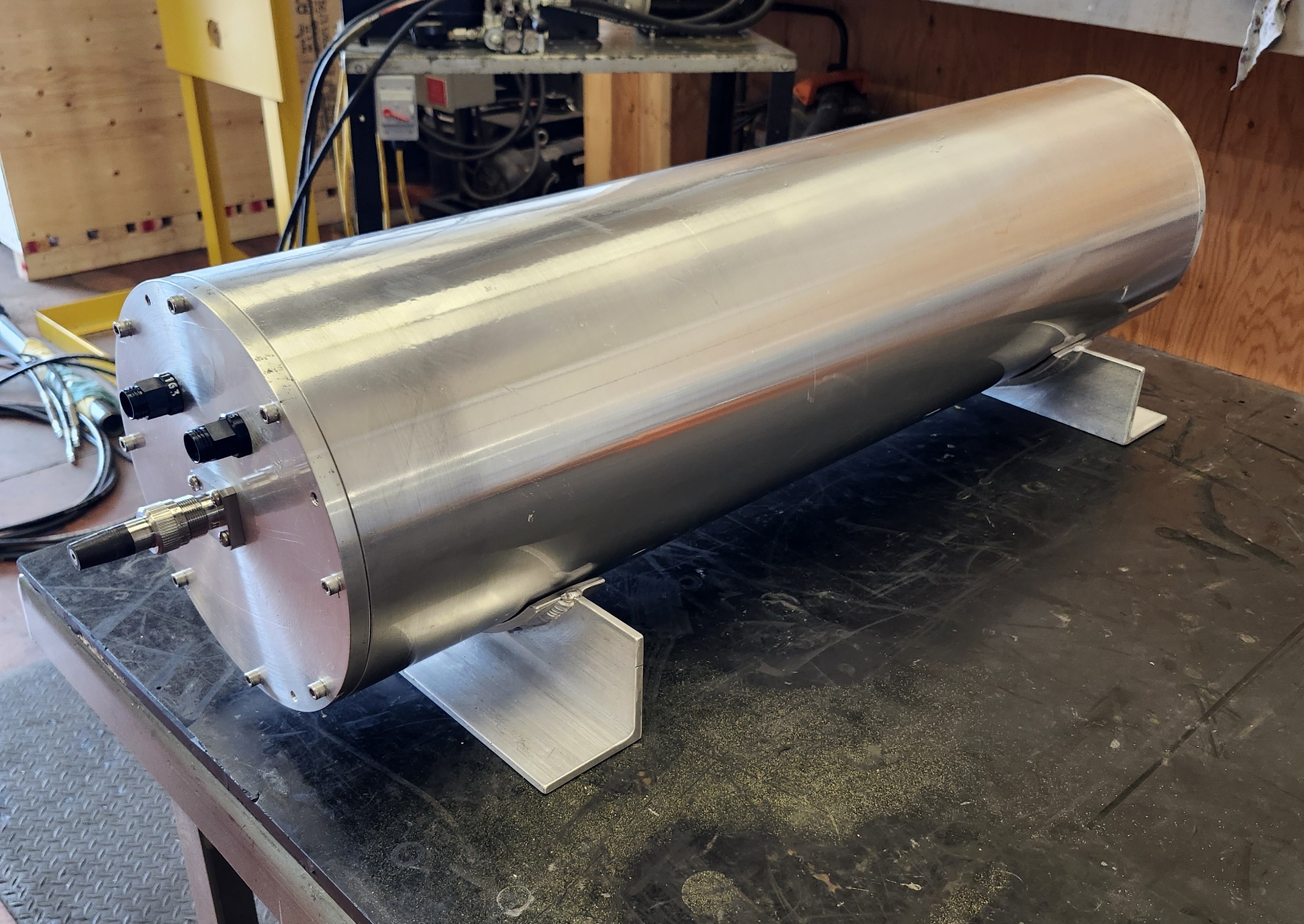
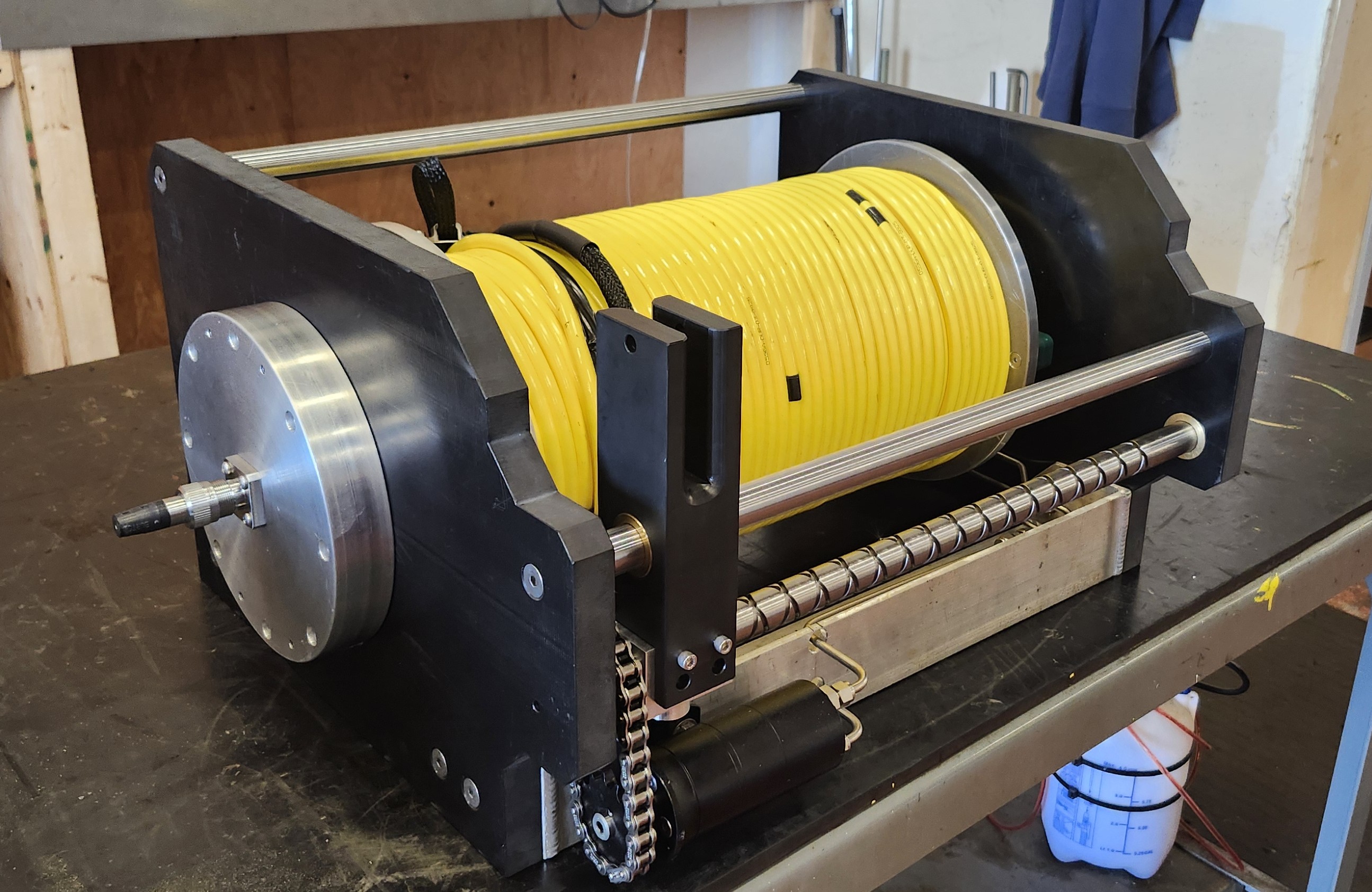
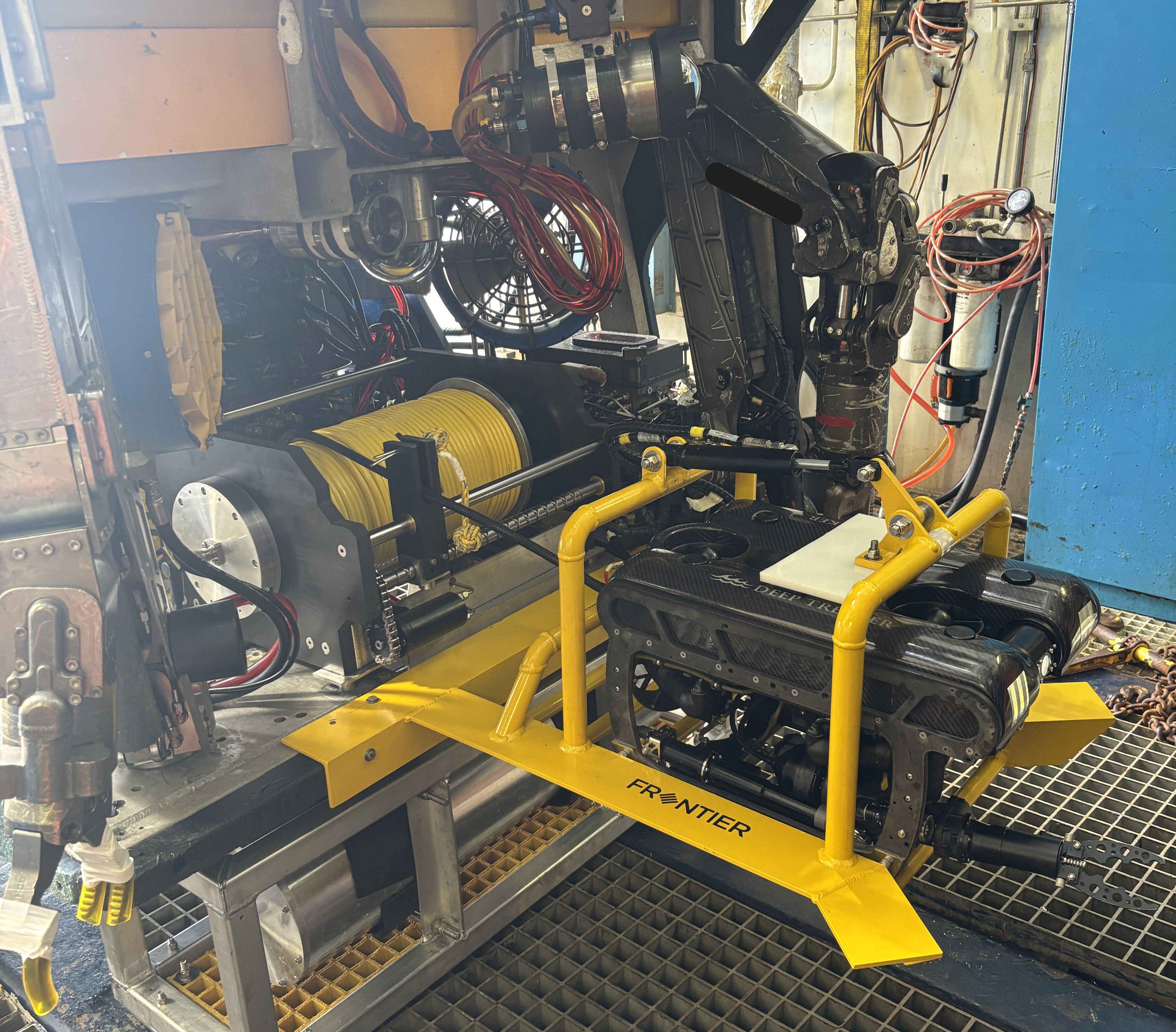
"The PIVOT comes with a tether and over-the-side or hand deployment, which wouldn’t work for our application. So, we had to come up with a mini TMS… tether management system… a deployment cage system to mount to the host ROV,” Aaron Lee, Senior Subsea Engineer explained. “We came up with an A-frame, a docking frame for the front of the host workclass ROV, and basically that had hydraulic clamps to keep it secure in place. We also came up with a custom hydraulic tether reel that had slip rings, providing full telemetry and control."
The custom porch cage allowed the PIVOT to be mounted securely on the front of the host vehicle, with hydraulics ensuring stability during deployment and recovery. The tether reel provided full telemetry and control signals to the topside control station.
"One of the biggest challenges was getting from the topside down through their umbilical and still getting signal and telemetry and keeping everything working… it was a bit of messing around, but we got it sorted."

"Most offshore Newfoundland ROV vessels operate with limits around 3 m HS, or significant wave height,” noted Moores. “We needed to meet that requirement to get our system down to the worksite at the time of year we were operating. That was the level of functionality required. We handled the design of the steel and aluminum components used to physically deploy the system. We also managed the fabrication, mounting, and integration onto the host ROV. All of that work was completed by our crew in conjunction with the ROV crew on board the vessel in port. The vessel then sailed offshore and deployed the system subsea at the work site."
Integration also involved collaboration with Deep Trekker’s technical support team to ensure compatibility of topside power kits and subsea interfaces:
"We worked a lot with Deep Trekker technical support… we took their topside kit… and then we integrated that into atmospheric cans, subsea housings, winches and related systems. So that's how we made it all work."
This system allowed the PIVOT to function as a fully operational inspection ROV while leveraging the transport, stability, and power supply of a larger work class vehicle.
“The PIVOT handles the work with no issues once it’s down there and looking at the pipe,” stated Lee. “The challenge is getting it from the boat, through the splash zone, to the work zone. That’s why we used the host ROV as our 'bus driver' to transport the system and get it down to the site."
The specific inspection challenge was a 36-inch-diameter, 65-meter-long pipe within a production platform, featuring tight bends, vertical sections, and debris accumulation. Standard work class ROVs were too large to access the pipe.

Moores explained, "The uniqueness of this problem was the size of the pipe we're trying to get inside…combined with its location, about 80 meters below the surface - the challenge was trying to get it down there and physically getting inside the pipe.”
Ward Avery, General Manager, described the site:
“The area to inspect is an open-ended subsea pipe that extends well below the surface. It comes out the side of the platform, so it’s open-ended and connected to the sea, and it typically doesn’t require an inspection. In this case, the client needed us to get inside to have a look. Larger ROVs, obviously, are not getting inside, or divers… It was a 36-inch pipe roughly 65 meters long… full of debris on the wall and angular bends. That's what we had to go check.”
Deploying a smaller inspection-class ROV into such confined spaces introduces additional risk, including entanglement, thruster interference, and potential impact with the pipe wall. Effective tether management, precise maneuvering, and careful environmental assessment were essential.
Moores, while noting that the only alternative might have been a robotic crawler in a similar setup, explained why the ROV was the best choice: "The benefit of using the PIVOT was… you can rotate around, go around bends and turns a little bit easier… you can go up and down within the pipe… being able to fly freely within that pipe was a big advantage."
The offshore environment, approximately 80 meters deep, further complicated deployment. Sea conditions, vessel motion, and dynamic currents required careful pre-deployment modeling, tether management, and contingency planning.
Learn how Deep Trekker's ROV successfully completed riser inspections under challenging offshore conditions, enhancing safety, efficiency, and reliability.
Frontier identified several critical capabilities of the PIVOT ROV that were essential for success in this confined-space operation:
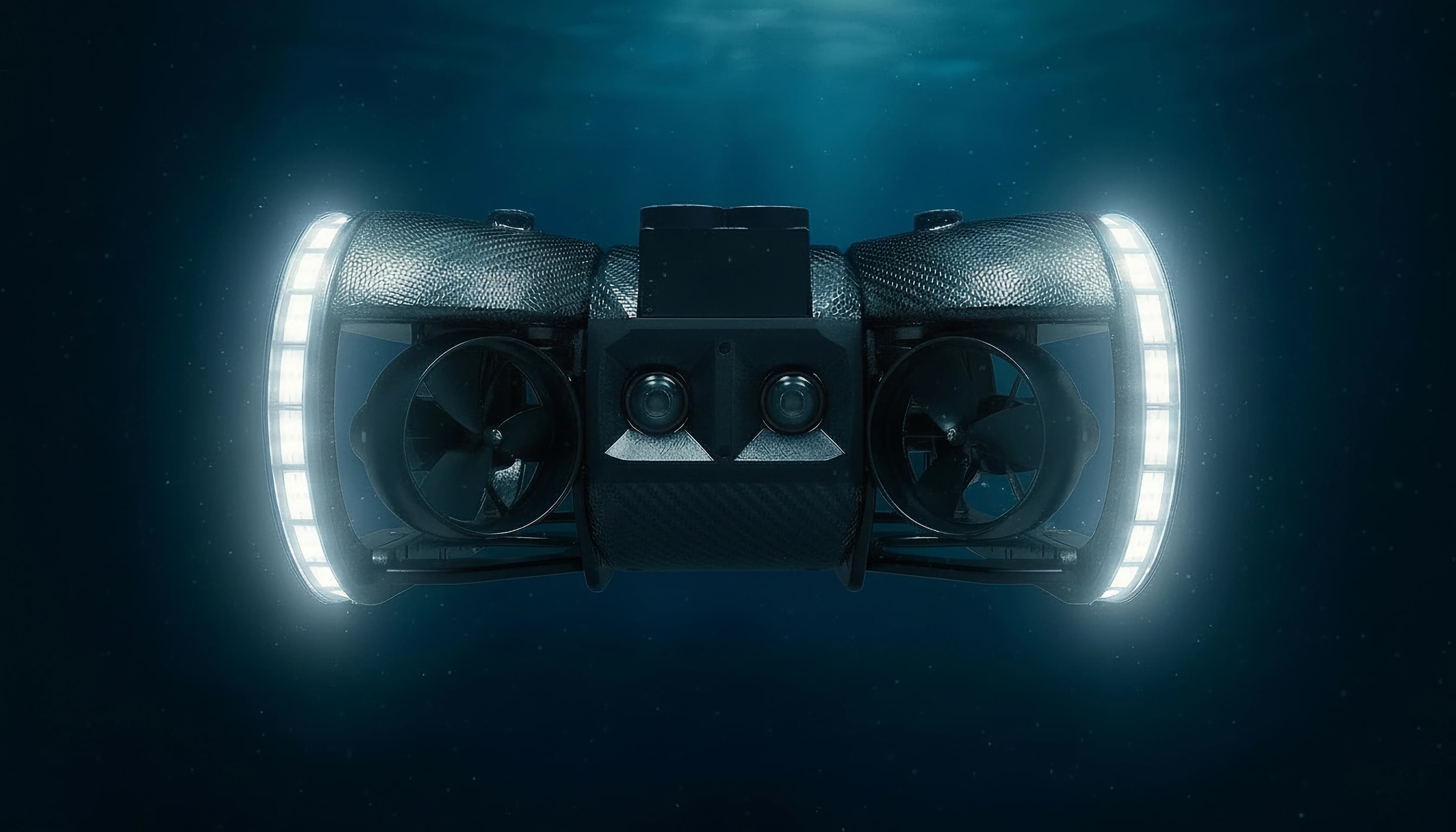
"We used the soil sampler and then we had the 4K camera up front with some auxiliary LEDs… There were a couple other vendors and smaller observation class ROVs we looked at… but they didn't have enough horsepower or thrust… so we pushed for the Deep Trekker. The PIVOT has a substantial amount of power in a little package. It performed really well," noted Lee.

The PIVOT’s combination of small form factor, powerful thrusters, and versatile tooling interfaces allowed it to operate in confined subsea structures where larger ROVs cannot fit. Its stability in currents and ability to manipulate tools under constrained conditions made it uniquely suitable for this type of inspection.
Operational planning involved detailed pre-dive checks, trials, and risk assessment. Standard offshore ROV procedures were applied, including vacuum testing, tether integrity checks, and bench-testing of topside telemetry integration.
"We developed a pre-dive checklist, pre and post dive and vacuum test,” explained Lee. “We did a bunch of shop testing… and then a nearshore trial to give confidence in the system before it went offshore. For the winch, we made our own subsea telemetry interface, it was all tested and vacuum sealed, that was bulletproof. As mentioned earlier, the biggest challenge was interfacing and getting communication up through the ROV MUX system for the work class ROV, which required a lot of fine-tuning and testing."
Expanding on the problems they faced, Aaron explained further, “The PIVOT comes with a 300 m tether for all control and telemetry signals. We cut that tether down to roughly 100 m, then had to connect it to the WROV umbilical through the A-frame and still maintain signal and telemetry. The biggest challenge was ensuring connectivity from the topside down through their HCS (Heave Compensation System) via the umbilical. It required some trial and error, but we got it working.”
Further, conceptual 3D models of the pipeline and the PIVOT ROV were used to confirm clearance and maneuverability.
"We did a 3D model of all the pipework, we had the P&IDs, and we built a full-scale model. We brought the PIVOT into the model and flew the scope just to make sure there was enough clearance, so we knew it would physically fit in there. If we had done that initial 20-meter run and didn’t really find anything, then maybe we would have investigated further and gone in deeper to see what was going on. But it was clear based on what we found in the initial 20 meters that they understood the issue, so there was no need to continue. The only reason we had the plan was to do it if necessary. We had confidence in the system and the ability of the ROV to go further - we just didn’t have to."
Contingency planning was also critical. The team prepared for tether entanglement, thruster obstruction, or telemetry loss:
Moores added, “We were also limited by the operational window for the platform, since it’s an active system, so efficiency and system reliability were critical - to know we could go in and perform the inspection. We develop contingency timelines and procedures to back ourselves out if needed. For example, if we were to lose power to the ROV, we had redundancy and operational contingencies built in to ensure we could get out of any situation.”
Deployment involved using the work-class ROV as a host, lowering the PIVOT to the splash zone, and then navigating it into the pipe. Progress was tracked using tether markings in combination with schematic drawings and P&IDs:
"We marked a tether with tape for five-meter increments, and looked at the 3D drawings and schematics, to figure out where we were in space," Aaron explained.

The inspection covered the first 25 meters of the pipe, sufficient to identify debris and blockages:
"We were able to get in through a couple of bends. We got in further than we anticipated. It's a bit of a risk where we're going, because of the chance of entanglement and entrapment of the ROV.… So we got in roughly 25 meters. That was more than enough for the data we achieved from the visual. We also took your soil sampler and modified that to get some marine samples and had those analyzed. Overall, the whole execution went well, and they got the results they were looking for."
Video was captured directly through the ROV’s recording system, supplemented with still images and field notes. This footage supported detailed inspection reporting and informed client decision-making.
The PIVOT ROV successfully accessed approximately 25-30 meters into the pipe - exceeding expectations - and captured all necessary data for the client. The team collected visual data inside the pipe while maintaining safe operation. The flexible thruster control and maneuverability also allowed the team to navigate bends without stirring excessive marine growth or disturbing the pipe surface.
"The first time we did this, as I mentioned earlier, we didn’t know what we were getting into.” reiterated Aaron. “The idea was to walk it in. We swam in a couple of meters, came back out, and everyone was happy and comfortable, and we got familiar with the pipe. Then we worked our way in and kept going. The PIVOT, with the variable adjustment on the thrusters, allowed us to have just enough thruster gain so it moved along slowly. It was very controlled. It wasn’t stirring up marine growth. Once we got further in, we obviously upped the thruster gain because we were dragging more tether inside the pipe - and it was able to haul all that through. If we only got in a meter, that would still have been beneficial. But we got in over 20 meters, and at that point they had obtained enough data and visuals that they were happy to conclude the inspection of the pipe."

The operation confirmed that integrating the PIVOT with a work-class ROV is both feasible and effective, providing a practical and successful method for confined-space inspections within subsea infrastructure. The team obtained the required visual data without diver intervention, while maintaining controlled movement inside a narrow pipe environment. The results demonstrate a repeatable approach for inspecting open-ended subsea piping where direct access is limited, opening the door to further applications within complex subsea infrastructure.
Traditional methods for confined-space inspection would have included crawlers or diver intervention, each with limitations in maneuverability, data quality, and operational risk.
The PIVOT ROV provided:
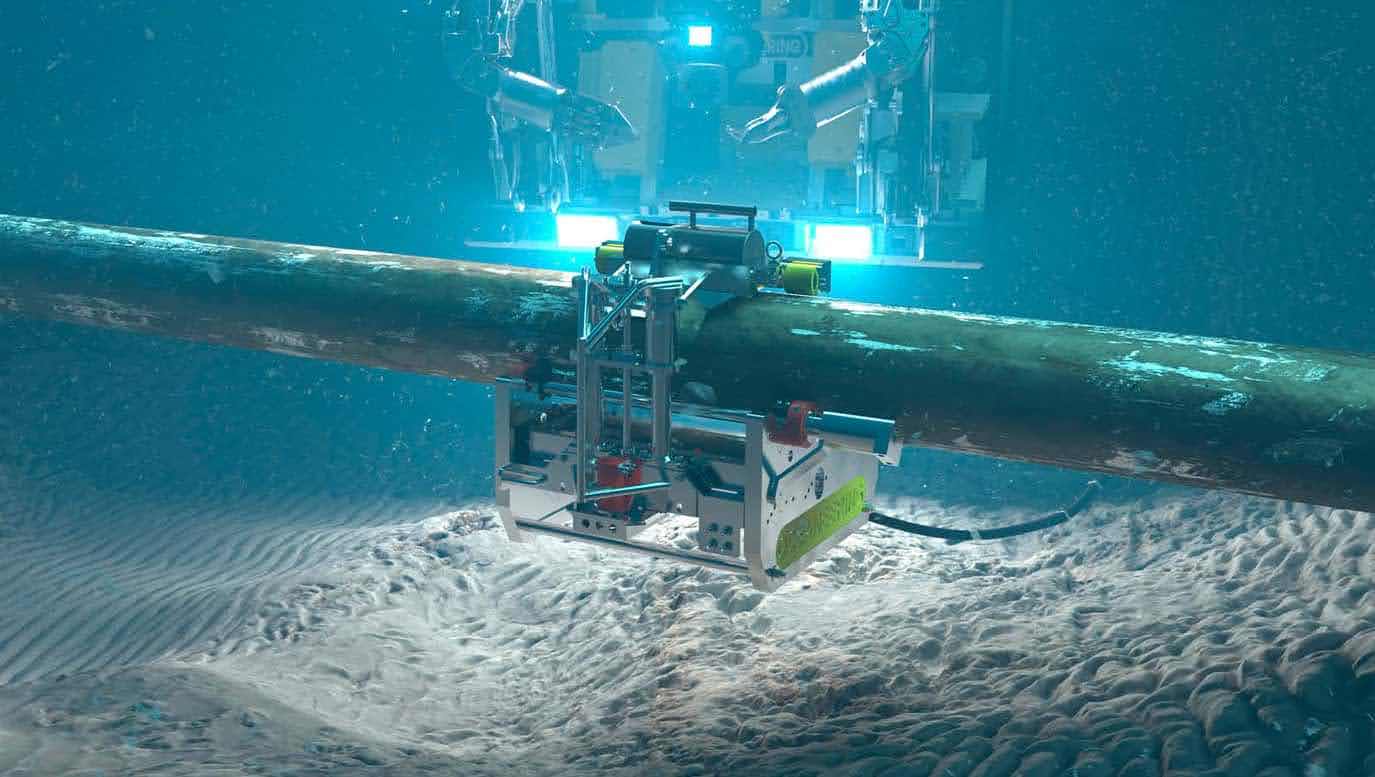
ROVs quickly detect corrosion, misalignment, and damage in subsea cables and pipelines — without costly downtime or diver risk.
This integration establishes a practical method for inspecting subsea structures with limited access, including manifolds, subsea xmas trees, and pipeline junctions - expanding the capability for detailed internal assessments without relying solely on external observation. Any infrastructure with restricted access could be inspected using this method.

“There could be an application where you have a suspected failure of a piece of equipment within a manifold or within a subsea xmas tree. You could then deploy this system to get inside and get a closer look, as opposed to trying to zoom in from the outside. That’s another potential application down the road for us."
The success of this deployment validates the concept of combining work class and small inspection-class ROVs for confined-space operations and provides a reliable and repeatable workflow for similar offshore inspections of subsea infrastructure, enabling closer assessment of otherwise inaccessible equipment.
The project’s success was built on close collaboration between Frontier’s engineering and operational teams, the vessel crew, and Deep Trekker technical support.
Moores reflected on the collaborative effort: "Aaron was the brains behind it and had the idea… and that, combined with Deep Trekker Technical Support, and our technicians here, too… and working with the vessel and the crew on board… It was a good team effort."
Each group played a vital role in planning, executing, and troubleshooting offshore operations. Client confidence was achieved through transparent testing, clear communication, and careful pre-deployment verification, ensuring everyone was aligned at every step.
“Ultimately, there were a lot of people involved, and it was very successful.”
This case study highlights how the Deep Trekker PIVOT ROV, when integrated with a larger work class ROV, enables precise, safe, and effective inspections of difficult to reach, confined subsea pipelines in offshore environments.
Key outcomes include:
This deployment also establishes a precedent for future offshore inspections, and a new operational model for offshore confined-space inspections of pipelines, manifolds, and subsea structures with restricted access - combining the stability and transport capabilities of work class ROVs with the agility and power of small inspection-class vehicles.
"Fundamentally, we're happy with the ROV. In terms of performance, that was key. We didn’t purchase the Deep Trekker unit specifically for this job - we already had it - but we were able to use the PIVOT to develop a solution that met the needs of one of our most valued clients. At the end of the day, the client was really pleased with the work we did and how the Deep Trekker vehicle performed. We’ve used it in previous years for standard inspection tasks, and it has always performed well with no issues. Technical support has consistently been reliable, which gave us the confidence to adapt it for this work scope."
The successful integration of the Deep Trekker PIVOT ROV with Frontier’s work class ROV highlights the value of compact, powerful, and flexible inspection systems in offshore operations. With the ability to access confined spaces, provide high-resolution visual data, and collect samples, this setup enables safer, more effective inspections and sets a foundation for future innovative applications.
"The client was really happy… and ultimately it was very successful with no issues at all offshore. It all went very, very smoothly."
Our team brings extensive hands-on experience in underwater robotics, offering practical guidance to integrate ROVs smoothly into your workflow. From pipeline and infrastructure inspections to water tank servicing, salvage missions, environmental surveys, search and recovery, aquaculture monitoring, and marine research, we provide solutions designed to meet the specific demands of each project. Deep Trekker’s advanced ROV technology allows you to tackle complex underwater tasks safely and efficiently.
When you're ready to secure your very own Deep Trekker vehicle, feel free to contact us, and we'll be happy to provide you with a customized quote tailored precisely to your requirements. Deploying one of our ROVs adds reliability, precision, and safety to your underwater operations, while saving you precious time and money.
Ask us about using ROVs to inspect the risers, hull, and water tanks on your offshore platform.

March 17th, 2026
Two-day AIMS training program teaches SAR teams how to integrate sonar...
March 11th, 2026
Deep Trekker’s SPECTRA ROV integrates 3D Sonar SLAM, 4K stereo vision,...

November 3rd, 2025
At REPMUS 2025, Deep Trekker’s ROVs validated real-world mine countermeasure capabilities...