Configure Now
Articulos en tu carro de compras0
0Articulos en tu carro de compras
Comienza a creando su paqueteCompra Ahora
Hay muchas estructuras que recorren nuestras ciudades que la mayoría no ve. Se requieren estructuras para entregar nuestras aguas residuales, aguas pluviales y agua potable hacia y desde las instalaciones de tratamiento y las ubicaciones de las fuentes. Estas estructuras necesitan inspecciones para determinar su viabilidad y condición a largo plazo, para tomar decisiones de reparación informadas. Reparar estas estructuras no es tan fácil como reparar edificios y carreteras, ya que estos se encuentran debajo de muchas otras estructuras e involucran muchas partes móviles para realizar estas reparaciones. Se llevan a cabo inspecciones para determinar la condición estructural, los niveles de sedimentos y más. Las inspecciones pueden ser realizadas por buzos, entrada a espacios confinados, excavación o vehículos robóticos.

Para inspecciones de túneles y tuberías completamente sumergidas, un ROV es una herramienta excelente. . En algunos entornos, como cuando el agua está turbia o el diámetro del túnel es grande, es difícil confiar solo en una cámara para realizar una inspección minuciosa. La visibilidad limitada puede dificultar la identificación de defectos. Un operador puede conducir el ROV más cerca de las paredes, la parte superior e inferior del túnel para obtener una imagen lo suficientemente clara, pero eso puede significar varias pasadas y es posible que no proporcione datos adecuados, como la comprensión de los niveles de sedimentos en el túnel.
Estos son algunos de los factores a considerar al elegir un ROV para la inspección de túneles
Lea nuestro artículo sobre sistemas Sonar y aprenda más sobre esta tecnología.
Agregar un sonar de imágenes al ROV permite a los operadores tener una mejor comprensión de la condición del túnel en su conjunto y permite identificar los siguientes defectos:
Encontrar estos defectos permite tomar decisiones de reparación. No todos los defectos requieren atención inmediata. A menudo, estos se convierten en puntos de interés para una evaluación posterior. El objetivo es identificar cambios a lo largo del tiempo, para ver si un defecto empeora rápida o lentamente. Si el defecto se encuentra en un punto crítico y su gravedad aumenta, las acciones de reparación deben ser inmediatas. Sin embargo, igualmente importante desde una perspectiva de costos, poder reducir los defectos que no requieren atención ayuda a reducir los gastos de reparación innecesarios. El beneficio de un ROV fácil de operar en su flota es que prácticamente cualquier operador puede asumir la revisión de estos defectos.
¿Necesita un Rov para realizar inspecciones de infraestructura sumergida?
En este video, nuestro equipo apoyó a Pipetek, un contratista de inspección de tuberías, en las inspecciones de túneles sumergidos y otras estructuras para Toronto Water.
El objetivo de esta misión en particular era evaluar la condición de un túnel combinado de alcantarillado y tormentas para Toronto Water. PipeTek necesitaba proporcionar un informe del túnel y las estructuras de entrada y bomba asociadas para determinar los mejores pasos a seguir para administrar la estructura. Dado que se trataba de un túnel completamente sumergido de 530 m de largo, se eligió el REVOLUTION ROV para la tarea. Los túneles más largos con sedimentos en el fondo demostraron ser más difíciles para los rastreadores de tuberías, robots con los que PipeTek tenía mucha más experiencia en ese momento. El problema con los rastreadores de tuberías es que sus ruedas u orugas agitan el sedimento, obstruyendo la vista del túnel. También tienen un rango de visión más corto, porque sus cámaras solo pueden elevarse hasta cierto punto desde el fondo del túnel. La entrada humana en un túnel tan largo sería demasiado peligrosa. Al utilizar un ROV de natación libre con un sonar de imágenes, PipeTek pudo capturar un informe completo de estos túneles y estructuras.
ROV de Deep Trekker REVOLUTION
Sonar de imágenes multihaz Blueprint Subsea Oculus M3000d
El REVOLUTION ROV es único por el cabezal giratorio de la cámara que también gira el cabezal del sonar. A medida que gira la cámara hacia arriba y hacia abajo, ese sonar también gira hacia arriba y hacia abajo. En esta imagen, la cámara en realidad apunta directamente hacia abajo 90 grados negativos.

El haz del sonar de 20 grados se extiende a lo largo de la pared frente al ROV. La nariz del ROV está contra la pared, por lo que está viendo la textura de esa pared como si alguien estuviera apuntando con una linterna brillante hacia abajo. Cuando apunta el sonar directamente hacia arriba y justo al borde del túnel, puede ver la cuerda y un poco de su sombra, así como esas burbujas que salen de la boca del túnel. Regrese el sonar a cero grados en ese ángulo y obtendrá una sección transversal de las paredes que se encuentran alrededor del ROV. Inclínelo un poco hacia arriba, verá el techo del túnel frente al ROV. Si pasa los 90 grados, puede ver justo en el borde del eje. Hay esas burbujas que suben por el eje que sale del túnel y mi atadura de nuevo hará que el sonar vuelva a bajar.
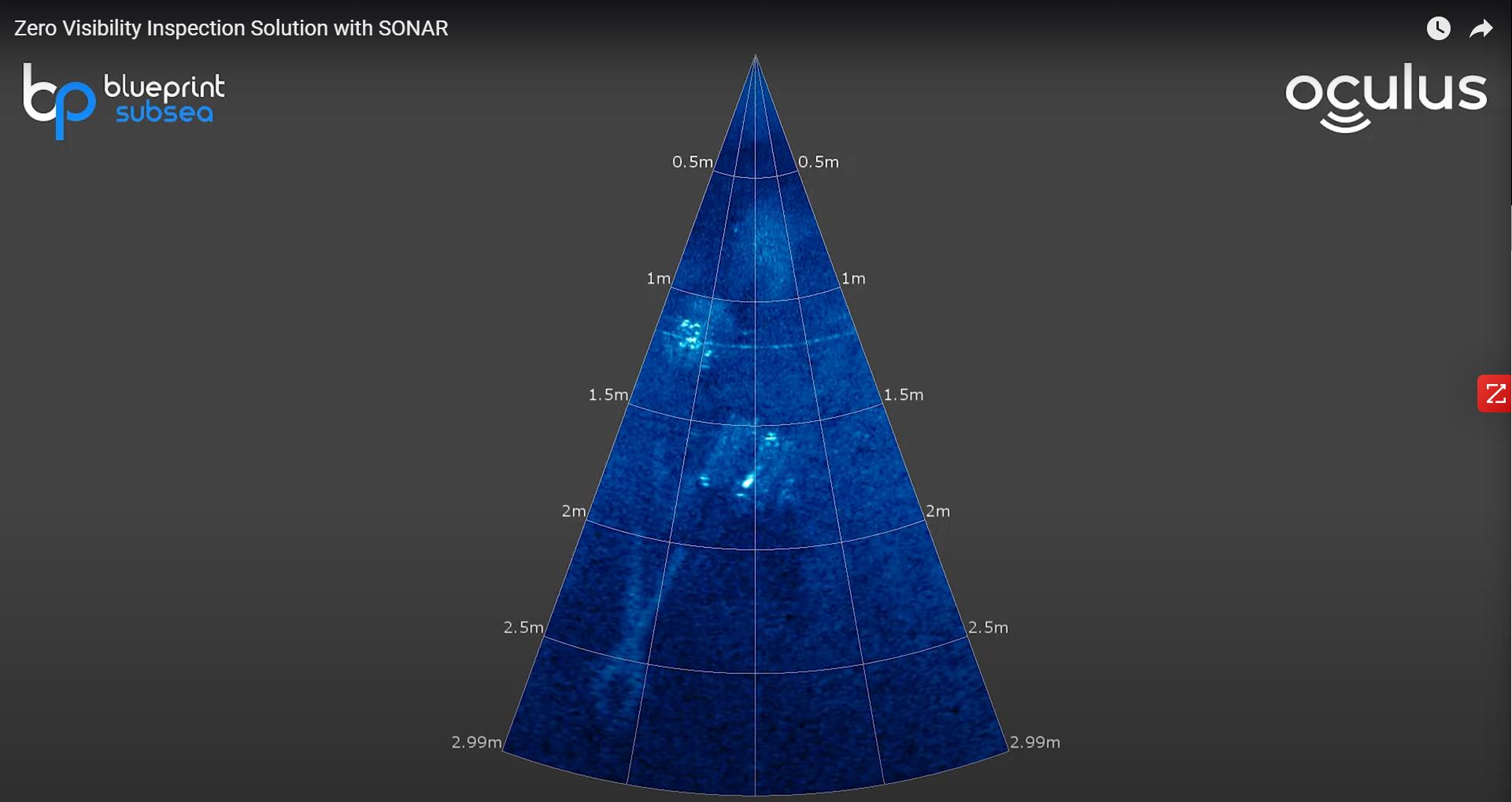
Ahora, la otra cosa que es interesante con el sonar giratorio es que puedes apuntar ese sonar ligeramente hacia abajo y ver el fondo de ese túnel. Desafortunadamente, está cubierto de sedimentos, por lo que esto no les dio a los operadores una buena idea de la estructura. En esta inspección, se centraron en la corona. Pueden ver allí que esas dos líneas dentro del túnel son los bordes de esa capa de sedimento. A medida que avanzábamos, mirando el techo del túnel, se podían identificar grietas donde hay un poco de sombra proyectada detrás de eso, lo que significa que hay algo elevado y descubrieron que tenía muchas grietas.
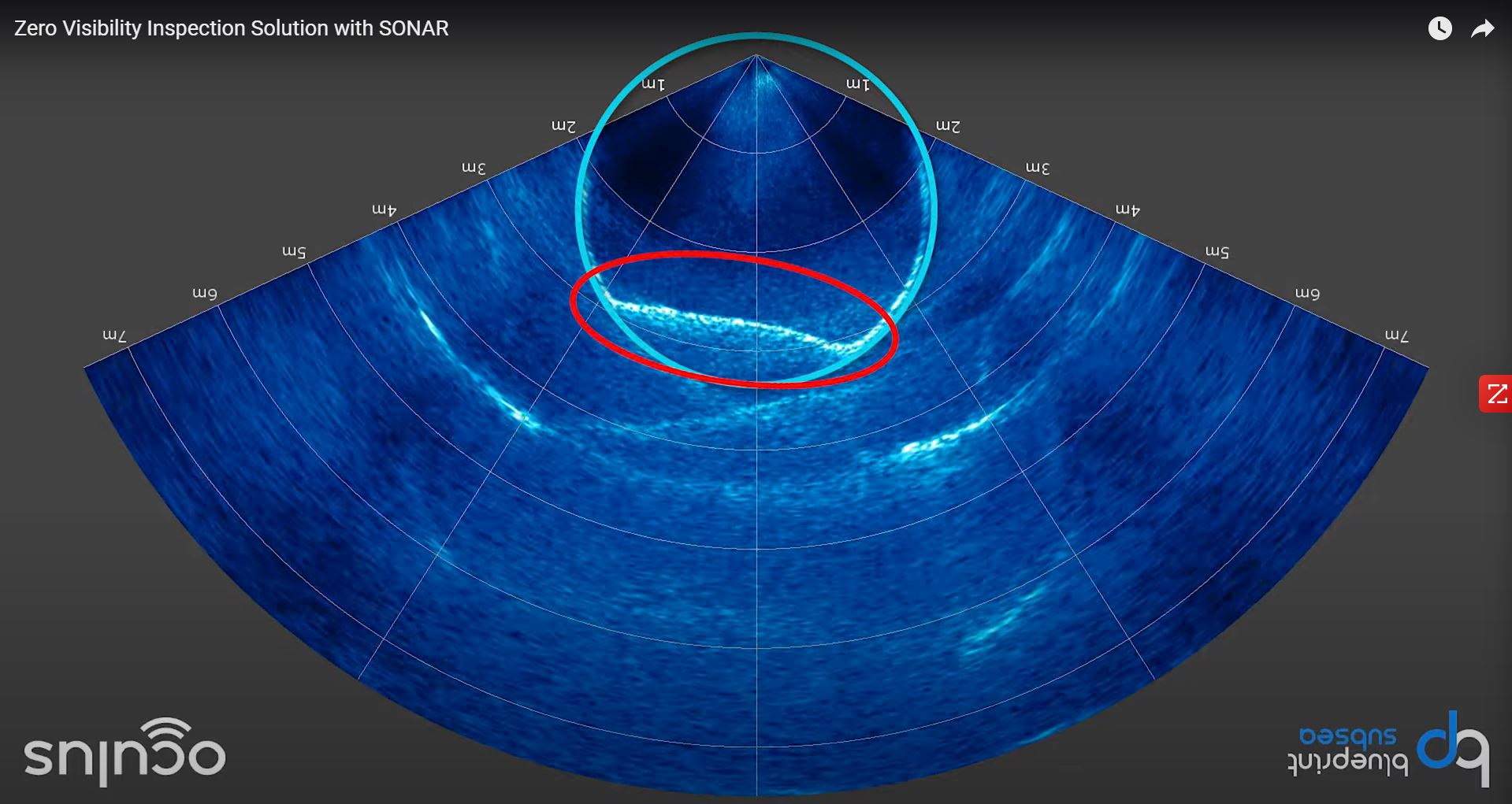
Se acumuló algo de sedimento a medida que el agua se abrió paso por la grieta y ese sedimento se adhería a la pared del túnel. Otra aplicación interesante aquí es que puede apuntar este sonar directamente hacia abajo, como vio anteriormente, pero debido a que están dentro de la estructura circundante, obtienen una sección transversal del túnel. Así que esa línea en la parte inferior que cruza lo que esperarías que fuera un círculo perfecto. Esa es la superficie del sedimento. A partir de ahí, podría tomar medidas periódicas de profundidad de sedimentos mientras conduce a través de un túnel.
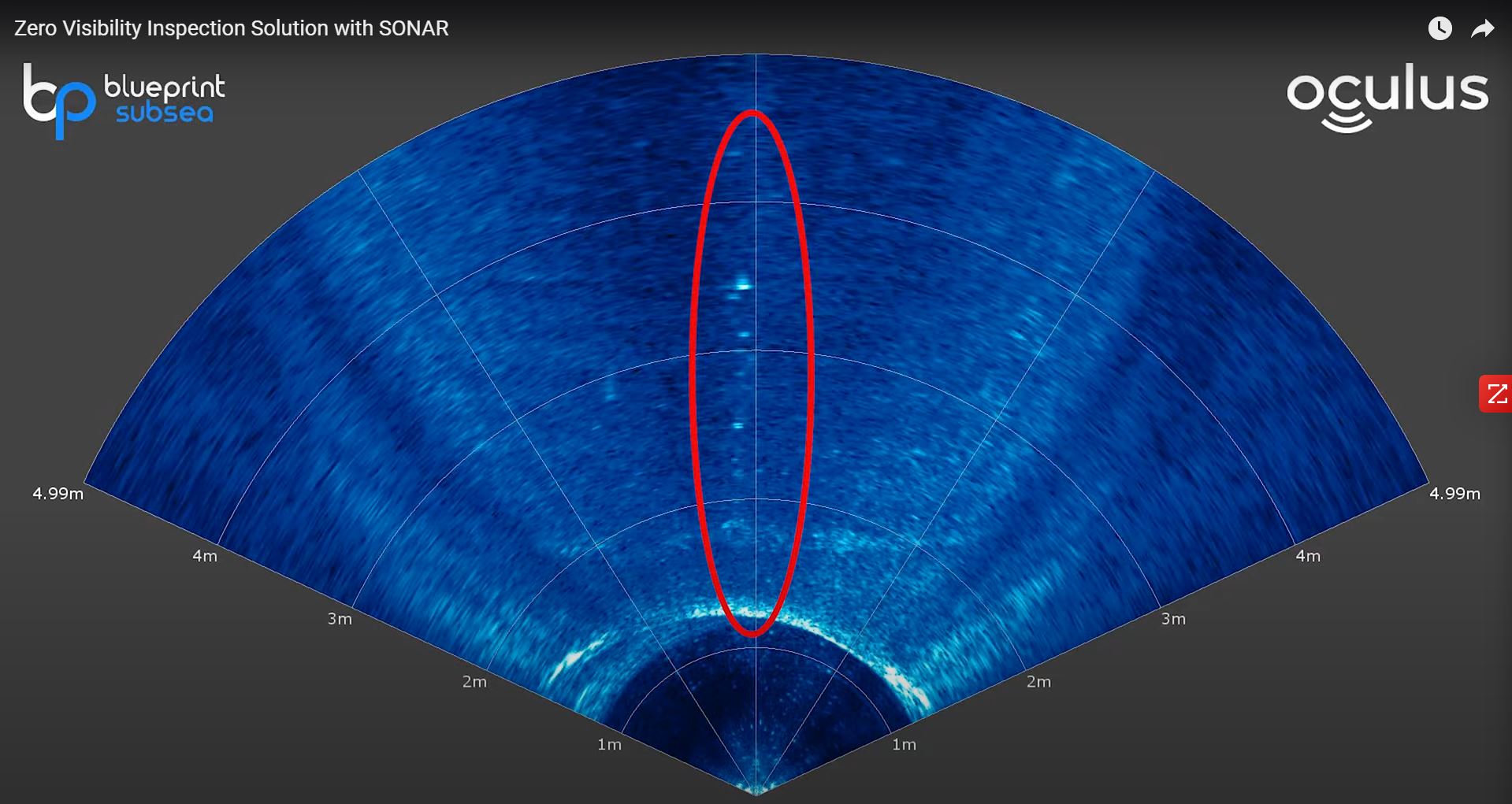
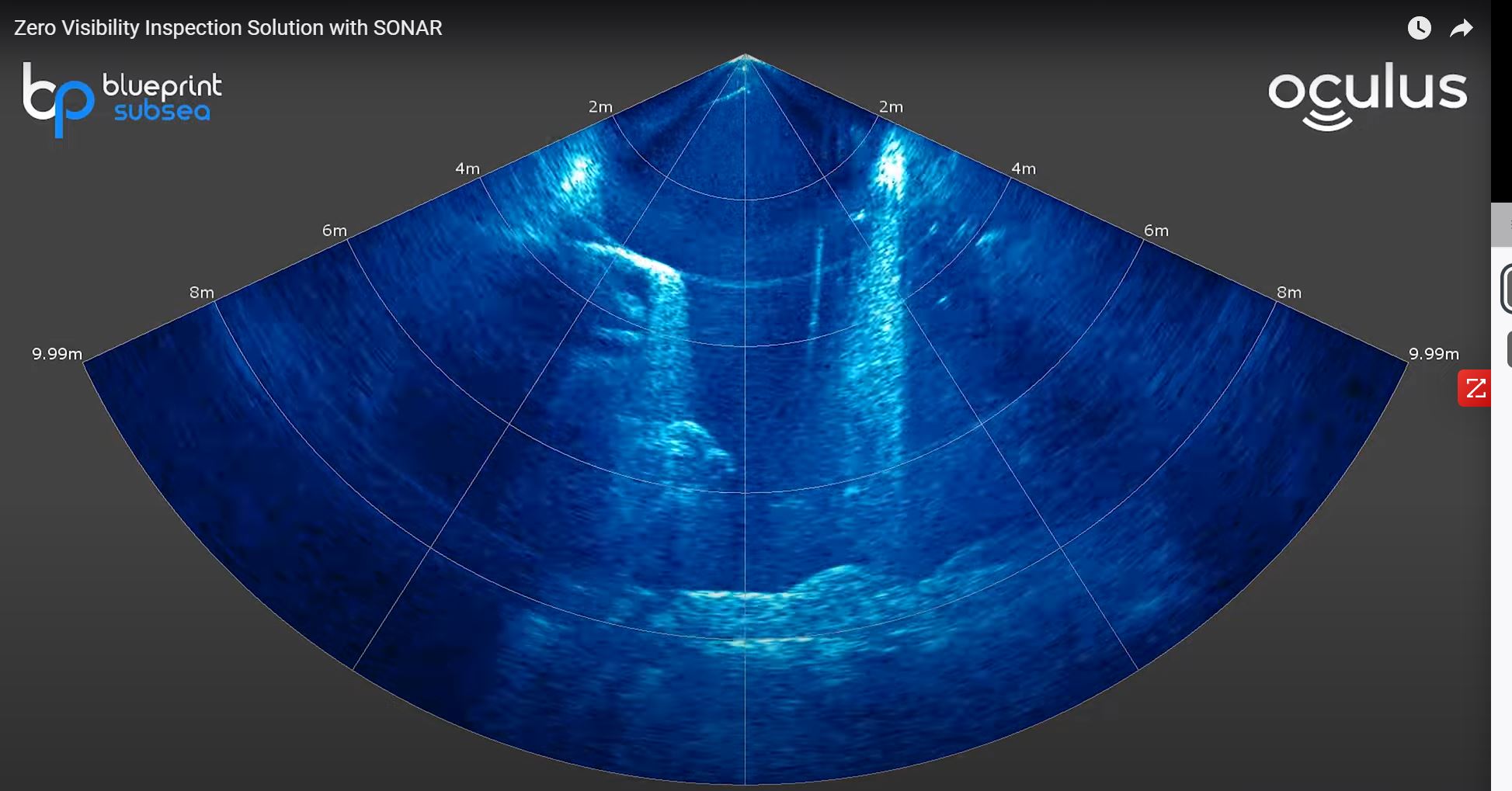
Otro ejemplo de una estructura interesante que se encontró se muestra a continuación. Incline el sonar hacia arriba y verá que hay una sombra larga. Cada vez que vea una sombra larga, significa que el objeto es alto. Hay algo que se proyecta hacia abajo desde el techo del túnel. Al maniobrar el ROV y la cabeza del sonar, puede obtener una mejor vista desde diferentes ángulos. A medida que se acercan y ajustan ligeramente el ángulo, puedes ver que hay un objeto cilíndrico. Esta es una tubería lateral que se proyecta hacia el techo del túnel. Pueden ver que hay un poco de escombros que sobresalen del extremo, por lo que marcan la ubicación de ese lateral.
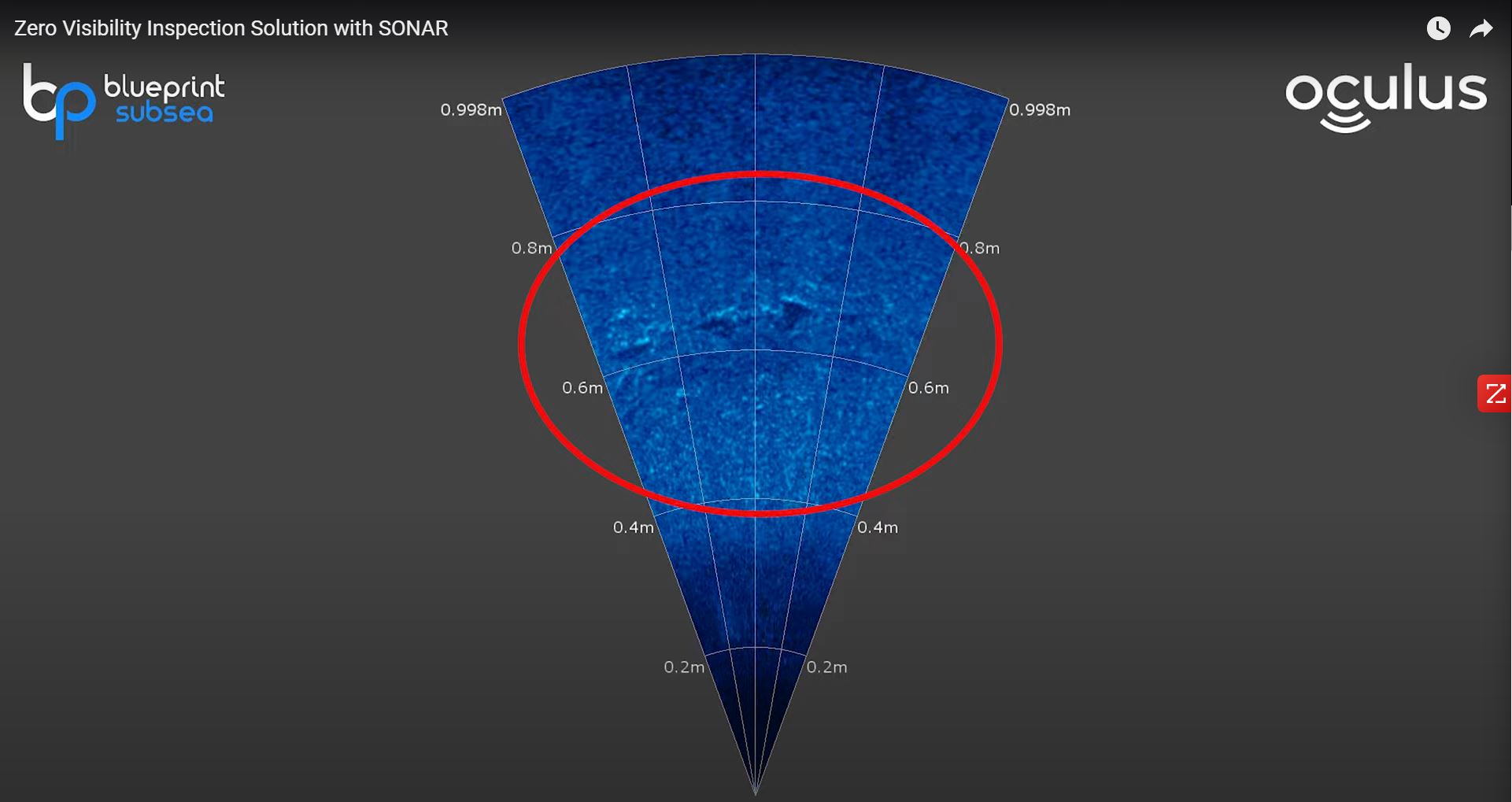
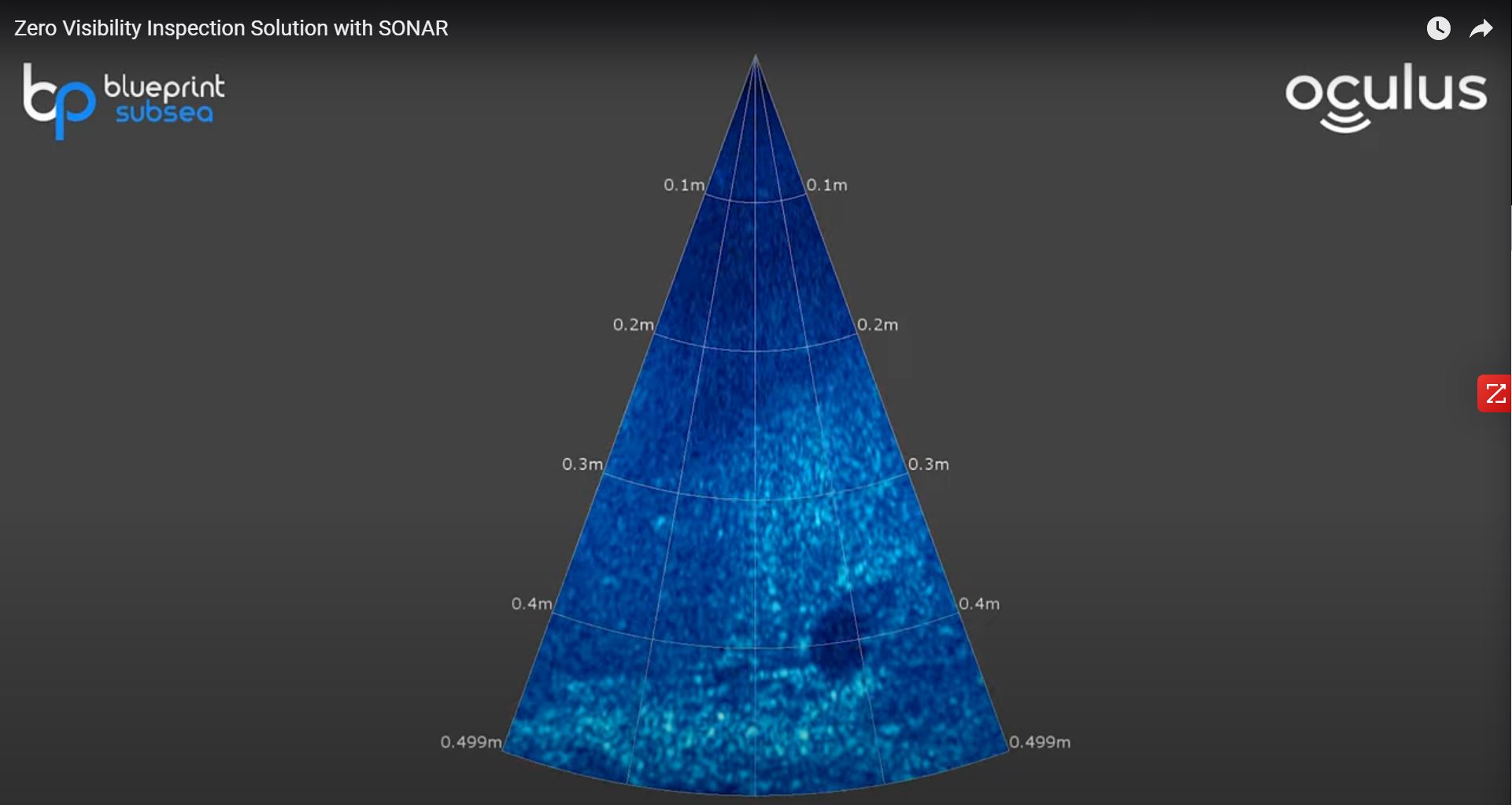
Curiosamente, fue el único visto en este túnel de 530 metros de largo. Aquí hay otro artefacto interesante y verás dos instancias de él. Hay burbujas en el medio, con un poco de óvalo, junto con el otro extremo de ese óvalo. Esta grieta ovalada es algo común en túneles como estos. Al rotar de lado a lado, puede obtener una imagen ligeramente mejor de su forma. Usando el software de sonda, ya sea en vivo durante la inspección o después de la inspección durante la revisión, puede usar la herramienta de regla para medir estos artefactos. Cuando aparecieron en el otro extremo de uno de estos túneles, estaban en la base de un gran depósito, que recoge el agua para que no haya una salida excesiva. Había tres bombas en esta sección, a la derecha, algunas de esas estructuras verticales con el material más grueso en la parte inferior. Con el uso del sonar, los operadores no solo pueden ver la estructura general en busca de obstrucciones o escombros, sino que también pueden tener una idea de la textura de la pared, identificando grietas obvias o roturas que se están desmoronando. Incluso con la sonda configurada en un rango de 10 m, puede ver detalles claros dentro de los 50 cm del cabezal de la sonda. Tener estas imágenes también es útil para tener conciencia de la situación cerca de las bombas, y comprender dónde no conducir para evitar enredos.
En estos entornos, es mejor configurar la ganancia baja, moverse lentamente y rotar la sonda para tener una mejor idea de su entorno. Un enfoque tranquilo y cuidadoso no solo evitará que los cables se enreden, que en realidad solo son una preocupación cerca de estructuras complejas como una bomba, sino que también producirá imágenes de sonar más claras. Esto es especialmente importante si otras partes interesadas están viendo la inspección después, les facilitará agregar notas y asimilar lo que se inspeccionó.
En esta toma, realizaron una órbita orientada hacia el exterior con el sonar apuntando hacia abajo, en busca de artefactos en la pared de un pozo. Se puede ver una fosa, para que se acerquen, tomen algunas medidas de su ubicación y su tamaño. Una última parte de esta encuesta involucró el uso del ROV para ayudar con la recuperación de un escáner montado en un trípode. El trípode se rompió y el escáner cayó al fondo del eje. El dispositivo de agarre del ROV generalmente puede ayudar en la recuperación de herramientas, pero el gran peso de este escáner combinado con su forma suave dificultaba el agarre con nuestros manipuladores. Otros objetos, ya sean víctimas de ahogamiento, losas de concreto o incluso scooters eléctricos, han demostrado ser objetivos perfectos para que los manipuladores de Deep Trekker los recuperen.
Se usó una gran garra en el extremo de dos cuerdas para recuperarlo. Cuando tiran de una cuerda, la garra se cierra alrededor de un objeto y tú tiras de la otra para recuperar el objetivo. El ROV con el sonar colocado cerca del objetivo pudo monitorear este proceso y ayudar con dónde y cuándo cerrar la garra grande.
En general, esta encuesta fue todo un éxito a pesar de tener cero visibilidad para la cámara. Usando el sonar de imágenes combinado con la flexibilidad del cabezal de la cámara giratoria en REVOLUTION, PipeTek pudo identificar varios puntos de interés para que Toronto Water los evaluara y planificara volver a inspeccionar, como laterales salientes, pozos, grietas y niveles de sedimentos. No solo se localizaron y fotografiaron estos puntos de interés, sino que también se pudieron medir con las herramientas de sonda disponibles.
Los sonares de imágenes son una opción extremadamente versátil y capaz para muchas aplicaciones diferentes, no solo para inspecciones de túneles. Los pilotos de ROV a menudo se refieren a ellos como el sensor más importante en un ROV. Los sonares de imágenes Blueprint Subsea son una herramienta excelente para las inspecciones de túneles, pero no son la única opción. Hemos visto Perfiladores de tuberías Imagennex 831L y sonares de exploración mecánica que también se utilizan para proporcionar valiosos datos de inspección de túneles. Estos sonares de exploración no brindan el nivel de detalle requerido para tomar decisiones de evaluación de condiciones en pequeños defectos, pero son excelentes herramientas para determinar la condición general de las tuberías, recopilar datos sobre ovalidad, niveles de sedimentos e identificar defectos importantes.
El uso de este tipo de tecnología puede parecer desalentador al principio, pero es más fácil una vez que tiene un poco de práctica de primera mano. La parte importante de determinar la herramienta adecuada para su proyecto es saber cuál es el objetivo final de la inspección.
Si necesita ayuda para encontrar la tecnología adecuada para sus misiones, comuníquese con nuestros expertos en robótica para encontrar la opción adecuada para sus aplicaciones y presupuesto. Nos complace ayudar, incluso si eso significa elegir una tecnología que no es Deep Trekker!