Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
Photogrammetry is a method of constructing a three dimensional (3D) model using two dimensional (2D) images. It comes from the combination of two Greek words: "photo" (light) and "metry" (measurement), indicating the process of measuring using light detection. It is a technique used to create accurate measurements, models, and maps of physical objects or environments utilizing and interpreting data from photographs. It’s important to ensure you have a selection of high quality footage, since this impacts the accuracy of the model created and forms the foundation for reliable models.

Figure 1: Before snapshot from 4k UHD Camera of a canoe

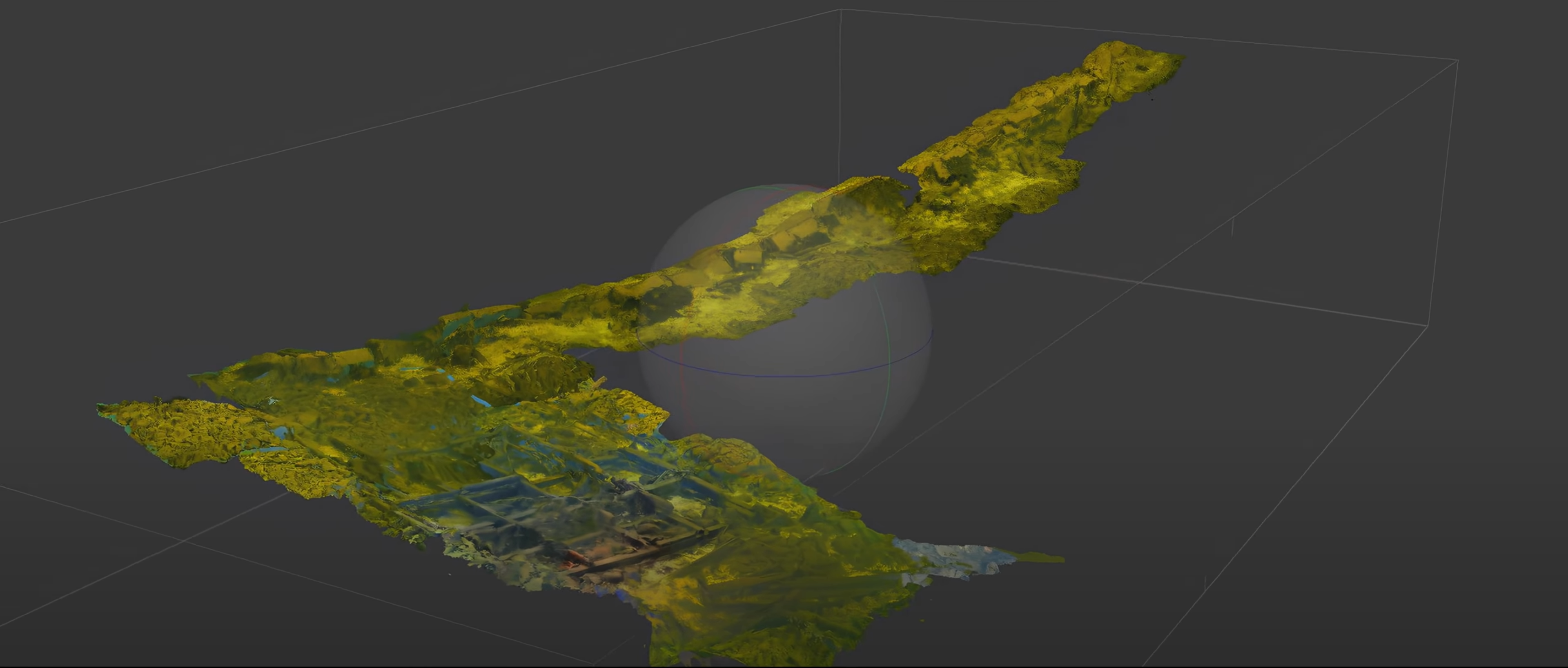
Figure 2: After render version using Photogrammetry
The process involves taking multiple photographs of an object or scene from different angles and positions, then stitching them together to create a model. Specialized cameras or Remotely Operated Vehicles (ROVs) equipped with high-resolution cameras and sensors are often used for capturing these images. These images should overlap from multiple viewpoints to ensure comprehensive coverage.
Once the photographs are taken and collected, photogrammetry software analyzes the images, finds and extracts information to determine characteristic points in the photos, then converts them into a mesh to reconstruct the 3D geometry and appearance of the object or environment. This process utilizes techniques such as feature matching, image alignment, and triangulation to determine the position, orientation, and depth information of the captured objects.
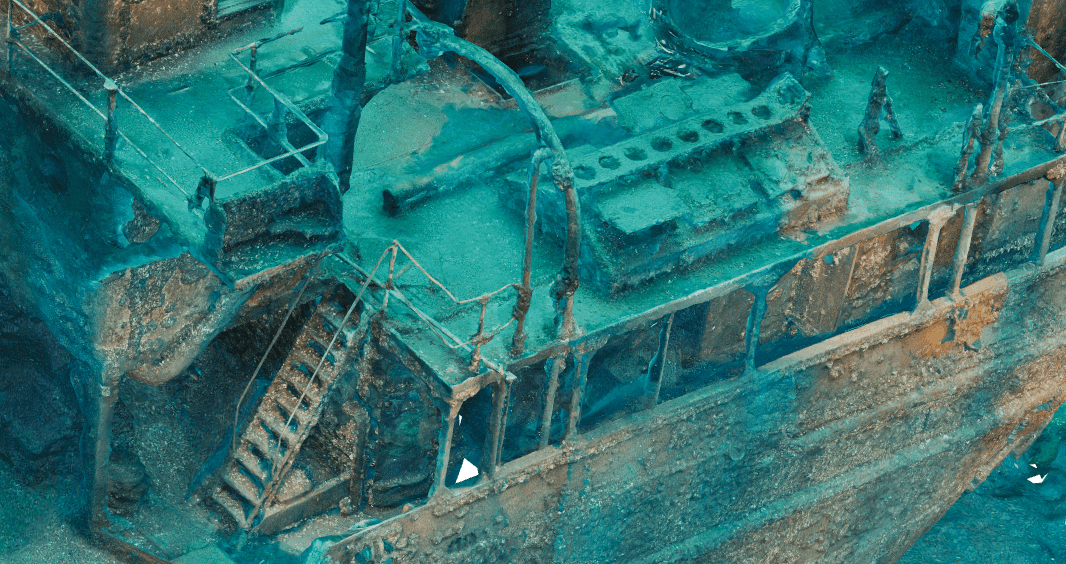
This method is particularly valuable for rendering 3D models of underwater infrastructure, aiding in inspections, maintenance, and repairs. It's also crucial for monitoring changes in underwater structures. By using multiple images and triangulation, photogrammetry provides accurate spatial information about these objects and environments. Since it creates a photographic record with precise measurements, it eliminates the need for repeated surveys, making it useful for creating digital archives and digital twins for research, conservation, education, and restoration purposes.
Photogrammetry is also invaluable in conditions that are unsafe or challenging to access, allowing data capture without physically touching or disturbing objects, making it ideal for documenting fragile or sensitive cultural artifacts, archaeological sites, and natural environments.
Discover how to find the best footage for your photogrammetry projects to create 3D models with unparalleled accuracy.
To embark on a successful photogrammetry project, you'll need specific equipment tailored to the task. Here's a breakdown of the essential tools required for underwater photogrammetry.
Optional Add-ons

Deep Trekker offers mission-ready underwater remotely operated vehicles with advanced autonomy capabilities. These ROVs come equipped with the new Mission Planner feature, an enhanced 4K camera, high-efficiency LED floodlights, and advanced stabilization systems, even in challenging underwater conditions. These features make Deep Trekker ROVs ideal for capturing high-quality underwater images for photogrammetry.
The Mission Planner feature utilizes advanced algorithms for intelligent pathfinding, and our NAV packages are equipped with IMUs, USBL, and DVL sensors for interpreting live positional data, enabling seamless autonomous navigation. Simply set waypoints by dragging and dropping or uploading preset coordinates, and watch as your ROV effortlessly follows the designated path, recording data along the way.
Deep Trekker’s Mission Planner also provides effortless operator control, allowing seamless transitions between autonomous navigation and manual control. With our intuitive BRIDGE technology, operators can adapt to changing underwater conditions, optimizing mission outcomes with the flexibility to switch between autonomous and manual control at any time, putting you in full command.

This feature is particularly well-suited for photogrammetry, enabling you to plot, adjust, and visualize waypoints on a convenient map interface, and take precise control over your ROV's navigation and mission objectives as you explore underwater environments. You can also set mission parameters such as speed, depth, and sensor configurations to ensure optimal data collection and precise navigation throughout the ROV's mission. Adapt and fine-tune each mission profile for maximum efficiency and data accuracy.
Combined with the Auto-Snapshot feature, getting the perfect shots for photogrammetry has never been easier. This feature is enabled by a toggle that allows for snapshots to be taken in intervals every 5 seconds. The SD card will then contain a dedicated folder for the session containing all the snapshots.

Before embarking on your photogrammetry journey, careful planning is essential. The first step is to plan the process by determining the area or object to be captured, identifying the required camera positions and angles, and considering factors such as lighting conditions and water clarity and turbidity.
With your plan in place, it's time to set up and deploy the Deep Trekker ROV to capture the images. Utilize the Mission Planner feature to autonomously navigate along a pre-planned route, capturing images from various angles.
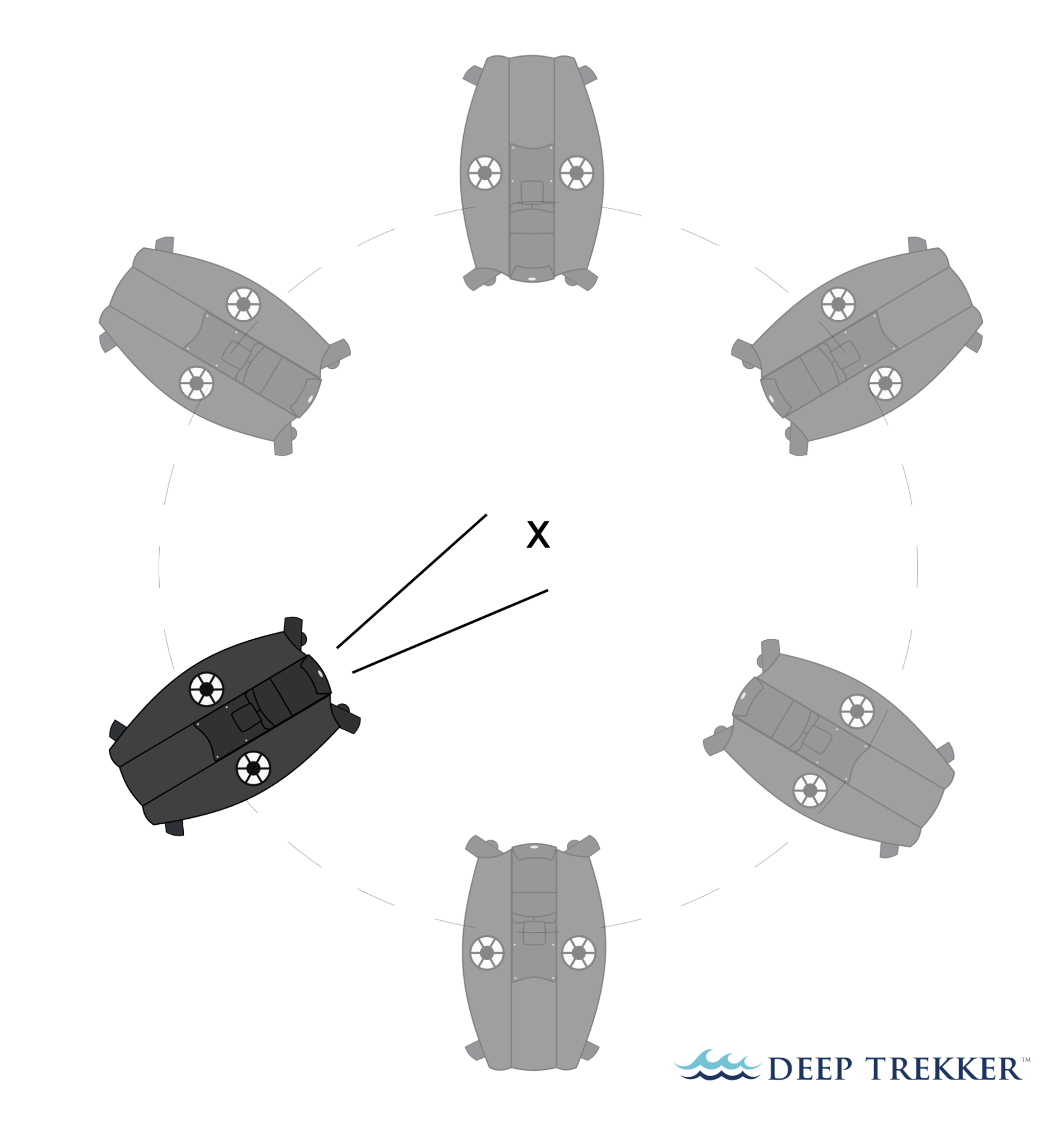
The pre-planned route usually follows the shape of the object or area that is being captured and ranges from a spiral, wave, or straight path.

There is no correct route but for better footage outcomes, it is best to cover the largest area possible. The best footage taken for an object would need the ROV to make a complete 360-degree rotation around the object.
To create accurate models, it’s important that photos maintain a significant overlap (50%+) between subsequent photos. Also keep in mind that close-up photos will help with producing high detail textures, and further away shots will aid in stitching the entire object together. Consistent colour balancing is also an important step while collecting footage.
You’ll want to avoid moving the ROV while taking the shots, and avoid stirring up debris from the sea bed that might obstruct your view. You should also consider using fast shutter speeds to avoid motion blur, reduce the aperture (high f-number) to have a large depth of field, and reduce the ISO to minimize the noise.
It’s also important to note that the effective focal length underwater is longer than it is in air, and in order to get accurate metadata, an underwater camera calibration process is typically necessary. Performing this calibration process will generate the parameters for focal length, principal point, and distortion.
For example, if the focal length of the lens (out of water) is 2.33 mm, the generated focal length underwater is closer to 3.3 - 3.6 mm.
You can also find great success with generating 3D models without this metadata by using photogrammetric software, which will estimate the metadata based on the images. You can try this method without any of the metadata using software such as 3DF Zephyr. We also recommend collecting the dataset using the Timed Auto-Snapshot feature mentioned earlier, as this should yield better results than extracting frames from a video.
Here are some simple tips to help guide you through the process of capturing quality images for photogrammetry using Deep Trekker ROVs.
Either leave the lights off (if there is sufficient ambient light), or turn the ROV auxiliary lights on. Avoid using the camera head lights to prevent particulate back-scatter.
It is important to adjust white balance after deciding the lighting. Switch the camera to manual white balance mode and tune the channels until the color is neutral - a good start point would be ⅓ in Red and ¼ in Blue, but this will vary based on depth and environment. The red channel will always be higher than blue.
Go to the Advanced Settings page and set the Noise Reduction slider to 0. This will keep the images sharp.

You should be driving as slow as possible during this capture.
It's also a good idea to record high bitrate & high resolution video during the photo collection as a backup.

After the images are collected, the photos are merged through the modeling software and processed. The software takes the series of 2D images taken from various angles and stitches them together. The 3D object is reconstructed using feature matching, image alignment, and triangulation to determine the position, orientation, and depth information of the captured objects.
An algorithm is used which retains the detail of each individual image, such as ship hull fragments, using data about its size, area, and position - referred to as a point cloud. This point cloud is used to map nodes or vertices onto a solid surface which then creates a mesh of the 3D model.
The software’s computational requirements can be demanding. It requires a powerful computer with adequate processing power, memory, and storage to handle the detailed reconstruction process. Users with limited hardware resources may experience slow processing times or even system crashes. Generating high-quality 3D models can be a time-consuming process, especially for large and complex datasets, and can take hours or even days to complete, depending on the complexity of the project and the available hardware resources.
Stantec Markham’s archaeological department was tasked with evaluating a dam structure in Nassau Mills in Peterborough, Ontario. This site housed an active dam that was approaching the end of its functional lifespan, as well as the historical remains of a previous dam from the 1800s. The goal of this survey was to examine the historical remains, while also identifying the construction methods used in past dams for new building plans.
Deep Trekker’s REVOLUTION and PIVOT ROVs were used in conjunction to provide extended battery life to last through the whole workday. Both of these devices are equipped with six thrusters, as well as rotating camera heads and tool platforms. Four of the six thrusters are vectored, while the remaining two are vertical, allowing for lateral and vertical movements without adjusting the ROV pitch. The only other piece of equipment used was a GoPro camera, which was used in combination with the vehicle’s camera for additional imaging. The GoPro camera was simply grasped between the grabber claw of the ROV when in use.

The first phase of Stantec’s photogrammetric modeling was the gathering of high-resolution images. The first challenge this project faced was the weather. The survey needed to be conducted during Canadian winter, with average low temperatures of -11 degrees Celsius for the area. Sending divers in at these temperatures would require extensive gear, and result in shorter dive times to limit exposure risk. Secondly, working near a dam structure produces high current and risks of differential pressure.
Project Archaeologist Mike Maloney stated, “If we had divers down, we're very close to a dam, there'd be a lot of safety concerns getting the work done.” To address these issues, Mike, alongside Darren Kipping, another archaeologist at Stantec, decided a Deep Trekker ROV was the best tactic for imaging. By equipping the ROV with a GoPro camera set to take JPEG images every two seconds, the duo was able to pilot the ROV in a grid pattern for extensive photo coverage from varying angles. This tactic was able to capture near continuous images by field swapping between two vehicles.

The pair explained that they were able to conduct the underwater survey much quicker than usual. Noting that, “Normally if we had divers down, we, as the archaeologists, would instruct them what to be looking for, what to record, and then they would come back up and inform us of what they've seen.” In a single afternoon, the team was able to capture all the imagery needed to move onto the second stage: modeling.
Once the necessary imagery was captured, Mike and Darren were able to upload their findings, alongside some previous side-scan sonar footage to generate photogrammetric models using photogrammetry software. Modeling software performs photogrammetric processing of digital images and generates 3D spatial data to be used in GIS applications, cultural heritage documentation, and visual effects production, as well as for indirect measurements of objects of various scales.
The figure above demonstrates the capabilities of precise measurements found in the modeling process. The images captured were able to render completely interactive models down to millimetric accuracy. Once finalized, Stantec was able to compare the photogrammetric renderings against historical documents to track the impact of environmental factors over time.
Using Deep Trekker ROVs, Stantec was able to quickly, safely, and easily capture all the photos needed for modeling in a single day. The speed in which two team members were able to complete a task like this was remarkable. By deploying ROVs, the pair of archaeologists were able to personally direct the vehicles to exactly where they needed to be, rather than communicate back and forth with a dive team. By empowering the end-user to capture the required images, they were able to successfully create high-detail 3D photogrammetric models of Nassau Mills dam, with no risk or repeating costs. After the project concluded, Stantec Markham immediately committed to the purchase of a PIVOT ROV for future modeling projects.
Photogrammetry finds applications across a spectrum of industries, providing an invaluable means of capturing and analyzing visual data.
In the Maritime sector, Deep Trekker ROVs equipped with photogrammetry capabilities prove indispensable for hull inspections, subsea inspections, subsea mapping, and seawall inspections.
The Energy industry benefits from the technology's prowess in dam inspections, creating digital twins of assets, subsea mapping, offshore inspections, and managing subsea cables.
In the Defense industry, the use of Deep Trekker ROVs for photogrammetry projects enhances situational awareness, aids in threat detection, and improves mission planning and execution. The ability to gather detailed underwater data through photogrammetry not only supports defense operations but also contributes to the safety and effectiveness of military activities in underwater environments.
In Aquaculture, the ability to capture high-quality images and 3D models supports efficient management and environmentally responsible practices, ultimately contributing to the sustainability and success of aquaculture operations.
In Ocean Science , photogrammetry aids in coral reef mapping and subsea mapping, facilitating the creation of digital twins for research.
Deep Trekker ROVs, with their compact and portable design, are particularly well-suited for Search and Recovery operations in a wide range of underwater environments, including lakes, rivers, and oceans. They provide a cost-effective and efficient means of conducting photogrammetry to document and analyze underwater scenes, contributing to the success of search and recovery missions and providing critical insights for investigations and environmental assessments.
Even in Infrastructure, these ROVs are instrumental in tank inspections, generating digital twins, and conducting stormwater inspections.
The versatility of Deep Trekker ROVs empowers various sectors to harness the power of photogrammetry for enhanced data-driven decision-making and assessments.
When it comes to harnessing the full potential of Deep Trekker ROVs for photogrammetry, selecting the right package can make all the difference. Deep Trekker offers a range of specialized packages, each tailored to cater to specific needs and applications.
Among the top choices for photogrammetry enthusiasts are the PHOTON NAV package, PIVOT NAV package, and REV NAV package. These comprehensive packages provide a suite of tools and features that enhance the capabilities of Deep Trekker ROVs, making them ideal for underwater imaging and data capture. Whether you're looking to explore the depths of marine environments or delve into the intricacies of submerged infrastructure, these packages offer an ideal solution for your photogrammetry needs.

The toughest micro ROV on the market is the ultimate portable “suitcase” ROV, weighing under 10 kg. With Deep Trekker’s BRIDGE technology to power it, the PHOTON offers users a lightweight option with advanced survey capabilities and a robust feature set, including a rotating enhanced 4K camera, six thruster design, and ability to expand with sonar, DVL, USBL.
Building on the base package, the NAV package provides additional capabilities and features, including a moving map tracking capability, autonomous stabilization features, and a tool skid with a grabber.

Featuring six powerful thrusters, lithium-ion batteries for portability, 4K camera (220° FOV), 305M (1000 ft) depth rating, bright LED floodlights, and up to 500m (1640 ft) tether. Built tough with anodized aluminum, carbon fiber, stainless steel and seamless integration with add-ons and sensors, such as sonar, USBL, and DVL systems.
The PIVOT NAV package delivers innovation, stability, power, speed and control in a portable package. Utilizing innovative USBL positioning and DVL technology, the PIVOT NAV provides users with real time location data.

FOV), it excels at control and station holding. Offering a 305M (1000 ft) depth rating, bright LED floodlights, up to 500m (1,640 ft) tether, and seamless integration with add-ons and sensors, such as sonar, USBL, and DVL Systems.
The REVOLUTION NAV package provides users with real time location data, making locating, tracking, and operating an ROV easier than ever before. Advanced stabilization features allow users to station hold against currents and pilot their vehicle precisely and accurately through varying water conditions.
With Deep Trekker, you gain access to portable, intuitive, and cost-effective underwater drones equipped with high-quality 4K cameras, powerful LED floodlights, and exceptional stability, ideal for photogrammetry projects.
Our commitment to customer-driven innovation ensures our remotely operated vehicles (ROVs) excel in various underwater tasks, continually improved based on user feedback. Plus, our industry-leading senior robotics team provides unwavering support and expertise to address your questions and technical needs.
When you choose Deep Trekker, you not only receive a premium ROV but also a dedicated partner for your underwater operations, offering guidance and tailored solutions for your specific projects. Contact us for a customized quote to start your submersible robot journey.

July 30th, 2021
Learn all about remotely operated vehicle pilots: how to become one,...

November 5th, 2024
Learn more about what sonar is and its many uses. Read...

December 23rd, 2021
ROVs and sonar can be used to inspect underwater structures such...