Configure Now
Articulos en tu carro de compras0
0Articulos en tu carro de compras
Comienza a creando su paqueteCompra Ahora
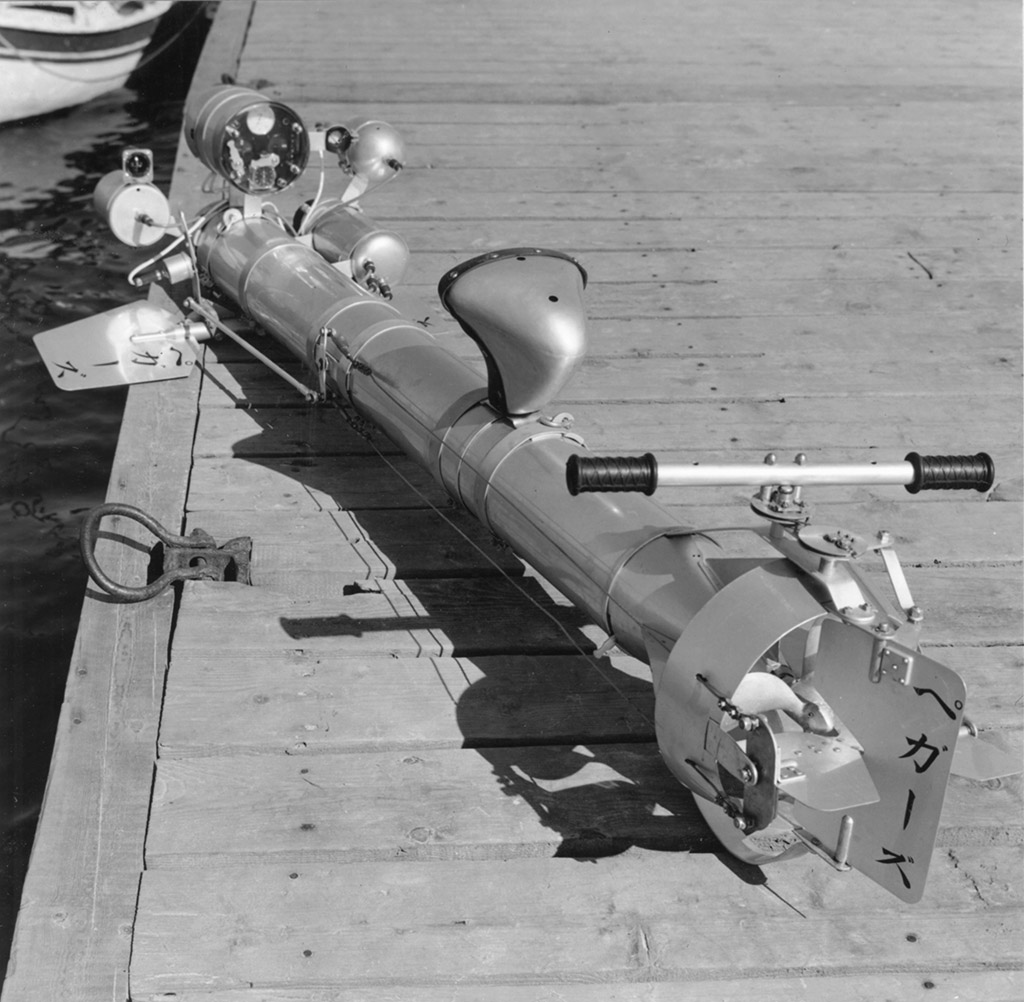
Desde la década de 1950, los drones submarinos se han desarrollado y utilizado. La Marina de los Estados Unidos abrió el camino para el desarrollo drones submarinos impulsando prototipos y la tecnología. Fue en la década de 1960 que la Armada comenzó a usar cámaras submarinas y drones para recuperar equipo perdido y explorar naufragios.
Fue incluso un dron submarino el que descubrió los restos del naufragio del Titanic en 1985. Al igual que con otras tecnologias. los drones submarinos han experimentado un boom en las últimas 2 décadas. Se han visto un montón de mejoras, aumento de la capacidad y alcance. Como resultado los drones submarinos modernos son mucho más avanzado que cualquier cosa que se haya visto ante y la innovación en la industria se sigue manteniendo.
"Los Drones submarinos fueron inventados por primera vez en la década de 1950. Su diseño les permitió llevar a cabo misiones para la Armada y universidades de investigación.
El dinero provenía del presupuesto de defensa. Al igual que muchas tecnologías que emergen de la Guerra Fría, los drones submarinos cayeron bajo el control del ejercito.
En la década de 1960, la tecnología continuó avanzando. Esto permitió que un dron submarion incluso recuperara una bomba nuclear perdida. La recuperación se produjo frente a las costas de España y se mantuvo en secreto durante muchos años.
A través de la década de 1970, las industrias comerciales comenzaron a adoptar y utilizar esta tecnologia con mayor medida.Un drone submarino, incluso salvo la tripulación de un submarino averiado durante la década de 1970. La demanda de los drones submarions crecio crecio exponencialmente debido a su eficacia y capacidad de hacer realizar que ningun humano podria realizar.
La década más famoso que que posicionaria la llegada de los drones acuatios fue le de 1980.
El hallazgo del Titanic por Robert Ballard requirio un nuevo tipo de ROV. Ellos desarrollaron esta máquina con la ayuda de la Armada. La última versión permitio el descubrimiento de los famosos restos del Titanic y el Bismarck.
En la década de 1990, los drones acuaticos comenzaron a hacer un trabajo más amplio y participar en diferentes industrias.
Los Drones submarinos más nuevos ahora vienen equipados con sistemas para desactivar minas y hacer otras tareas de alto peligro que antes dependían de los buceadores humanos. También se mejoraron los métodos de despliegue y la duración de la batería. Estas mejoras llevaron a una gama aún más extensa de industrias a que utilizaran los drones submarinos.
La década del 2000 vio un gran impulso en drones submarinos. La razón detrás de esto fue la mejora de la tecnología en las baterías de iones de litio.
Como este método de almacenamiento de energía fue mejorado, también lo hizo la construcción de los drones acuaticos. En las últimas décadas, un avión no tripulado requeriría una enorme grua y un barco de investigación completo para implementar. En la década de 2000, se hizo posible desplegarlos en barcos mucho más pequeños y los drones rov comenzaron a volverse cada vez más portatiles.
Desde entonces, el uso de drones submarions ha seguido creciendo, hoy en día los drones acuticos se utilizan en multiples industrias y misiones militares en todo el mundo.
Los drones submarinos modernos son como submarinos miniatura sin tripulación. Estos drones no tripulados submarinos tienen dificultades para mandar señales de radio a la superficie. Pueden ser autónomos, utilizando sus sensores a bordo siguiendo su propio rastro mediante sistemas de navegación. Otro método es utilizando un cable de sujeción que permite una conexión directa entre un controlador y el dron submarino
Funciona un submarino con aviones no tripulados mediante el control de su flotabilidad para que no se hunda. Como todos los vehículos submarinos, tienen profundidades de deformación y pueden ser diseñados para diferentes condiciones de operación. Los motores que utilizan el agua de empuje y permiten que el avión no tripulado para moverse, ya sea por mandato o por su cuenta.
La mayor parte bajo el agua zánganos utilizar una línea que los conecta con la sala de control donde son operados. Dentro de esta sala de control, los operadores pueden gestionar la inclinación, elevación y orientación del vehículo en tiempo real. Cámaras actúan como los ojos, lo que permite a los operadores para guiar el avión no tripulado a su objetivo.

| Width: | 325 mm (12.8”) |
| Height: | 258 mm (10.2”) |
| Length: | 279 mm (11.0”) |
| Weight (in air): | 8.5 kg (18.7 lb) |
| Body Material: | Die Cast Aluminum |
| Window Material: | Acrylic |
| Depth Rating: | 200 m (656 ft) |
| Operating Temp: | -10°C to 50°C (14°F – 122°F) |
| Case (option): | Custom Pelican Air 1637 Handle and Wheels |
| Warranty: | 1 Year – Parts and Labor (optional 2-3) |
Underwater ROVs trace their origins back to the mid-20th century when they were primarily developed for military and industrial purposes. The U.S. Navy pioneered early designs in the 1950s, creating vehicles capable of retrieving lost equipment and performing inspections in deep-sea environments.
The discovery of the Titanic by Robert Ballard prompted the development of a new type of ROV. They developed this machine with help from the Navy. The latest version enabled the discovery of the famous wrecks of the Titanic and Bismarck.
By the 1980s, advancements in materials, electronics, and imaging technology expanded their use to commercial applications. The oil and gas industry adopted ROVs for deepwater drilling support, revolutionizing subsea infrastructure management.
In recent decades, compact and portable underwater ROVs, such as Deep Trekker's models, have brought these capabilities to a wider range of users. From scientific research to aquaculture, modern ROVs are accessible, cost-effective, and highly versatile.
Early ROVs required tethered connections to large power systems, limiting mobility. Today, innovations in battery technology and portability have enabled tools like the DTG3 to operate seamlessly in remote locations, empowering smaller teams to accomplish complex underwater tasks.
ROVs combine advanced technology with user-friendly controls. Cameras provide real-time video feeds, while sensors relay critical data like depth and water temperature. Pilots use joysticks or intuitive interfaces to maneuver the vehicle, enabling precise control in demanding conditions.
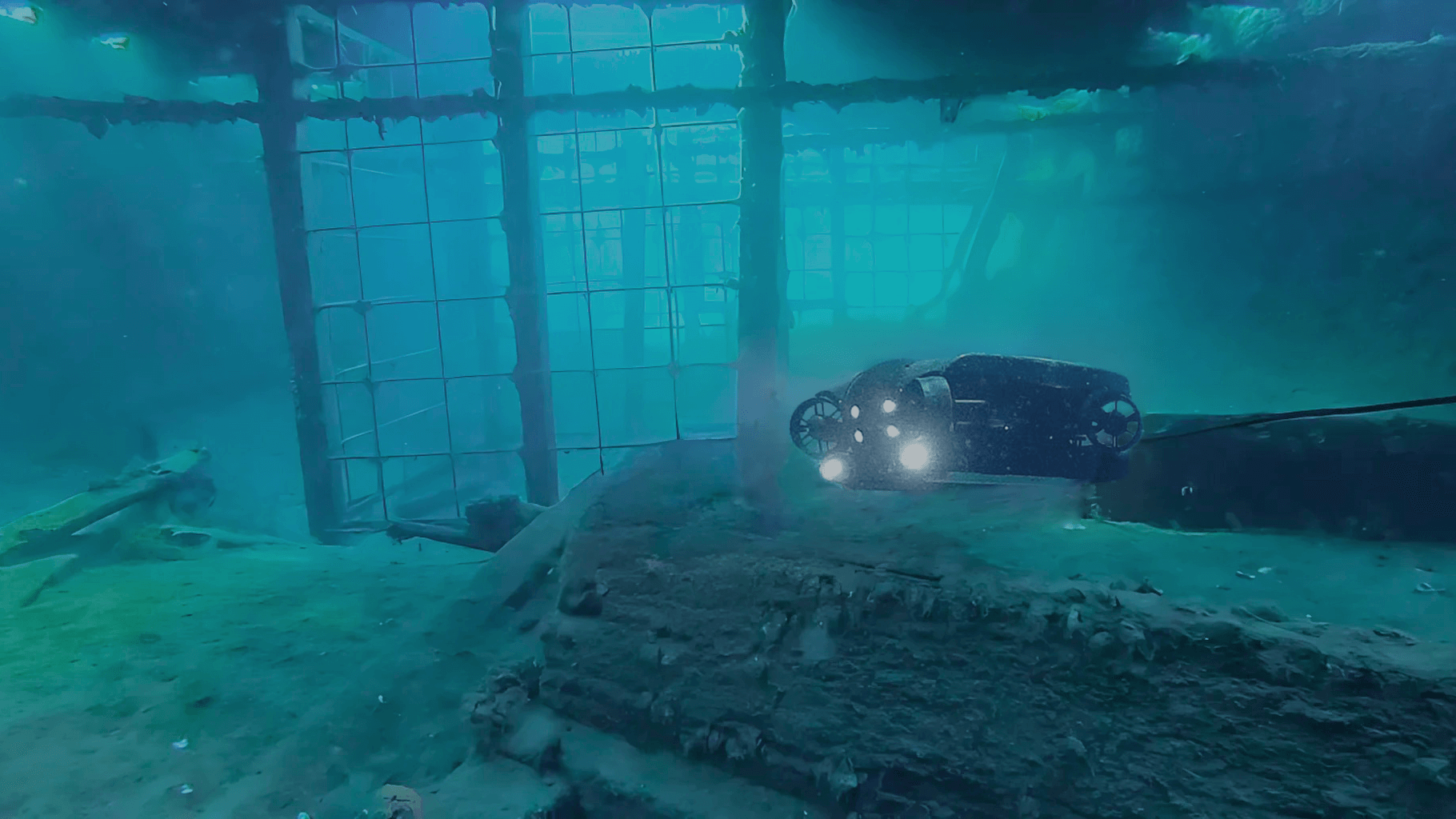
Modern systems are increasingly incorporating onboard processing and perception technologies. For example, newer platforms like SPECTRA integrate real-time 3D sonar SLAM, allowing the vehicle to continuously build a spatial model of its surroundings while estimating position and orientation. This provides operators with live environmental context, improving navigation and inspection coverage in low-visibility or GNSS-denied environments.
Underwater drones, or ROVs, provide several key benefits that make them invaluable for a wide range of applications. Their versatility, efficiency, and safety features allow users to accomplish complex tasks with precision and reliability.
Underwater ROVs eliminate the need for human divers in hazardous environments, such as strong currents, deep waters, or confined spaces. This reduces the risk of injury while ensuring thorough inspections and data collection. For example, a nuclear plant can utilize a Deep Trekker underwater ROV to inspect reactor cooling structures, avoiding the risks associated with human entry into radioactive areas.

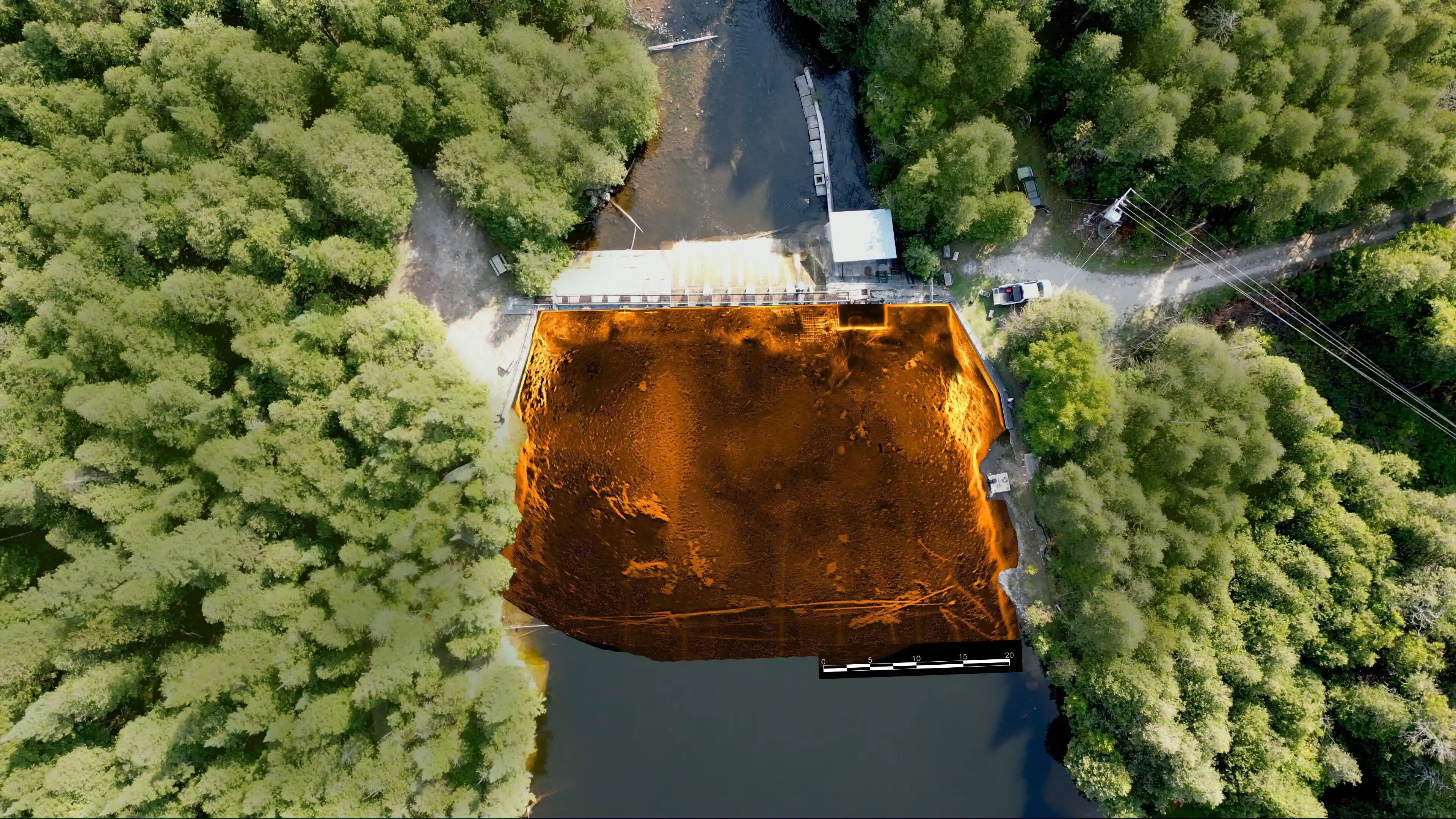
By reducing the need for costly equipment, personnel, and downtime, ROVs lower operational expenses. They enable detailed inspections and maintenance without extensive setups, such as scaffolding or dewatering systems. For example, a hydropower facility can save thousands of dollars by using a Deep Trekker ROV for underwater dam inspections instead of draining the reservoir.
Modern underwater drones are portable and easy to deploy, allowing users to access hard-to-reach locations quickly. Their lightweight designs and advanced battery technology enable operations in remote areas without heavy logistical support.
This portability now extends into higher-performance categories. SPECTRA, for example, remains hand-deployable despite offering thrust, depth ratings (up to 1,000 m), and sensing capabilities typically associated with larger systems, reducing the need for cranes, large crews, or dedicated vessels.
Equipped with ultra high-resolution cameras, sonar, and sensors, ROVs provide comprehensive data for analysis. This ensures accurate reporting, aiding decision-making processes across various industries. For example, an environmental organization can use an underwater ROV with 4K imaging to monitor coral reef health, collecting data critical for conservation efforts.

Recent advancements significantly expand data fidelity. Systems like SPECTRA combine factory-calibrated stereo 4K cameras with high-output lighting to enable metrically accurate 3D model generation without external reference markers. In parallel, integrated 3D sonar SLAM produces real-time point clouds, allowing operators to verify inspection coverage before leaving site.
From aquaculture and marine research to infrastructure inspections, ROVs excel in diverse environments. Their modular designs allow for customization, ensuring that each vehicle can be tailored to specific needs. For example, an oil and gas company can equip a Deep Trekker REVOLUTION ROV with sonar to locate and assess subsea pipelines effectively.
Ultimately, underwater ROVs offer significant advantages by improving safety, lowering costs, and delivering accurate results, making them essential tools for professionals and enthusiasts alike.
Building a reliable and robust underwater ROV requires innovative engineering and durable materials. Deep Trekker’s designs prioritize longevity, performance, and ease of use, ensuring reliable operation in demanding underwater environments.
Underwater ROVs, initially pioneered by the Navy, are now widely used across offshore, defense, nuclear, maritime, and emergency response sectors. Their ability to operate in hazardous, deep, or low-visibility environments makes them a practical tool for inspection, survey, and intervention tasks where diver access is limited or unsafe-providing innovative solutions to complex challenges in aquatic environments.
With the introduction of higher-performance portable systems like SPECTRA, these applications now extend further into:
This expands the role of portable ROVs beyond observation into detailed inspection and survey scopes.

Offshore operators rely on ROVs for inspection, repair, and maintenance (IRM) of subsea assets, including pipelines, risers, jackets, and subsea structures. These environments often involve strong currents, limited visibility, and complex geometries. ROVs enable close visual inspection, sonar-based assessment, and repeatable survey workflows without interrupting production. High-performance portable systems are increasingly used to complete inspection scopes that previously required larger work-class vehicles.


![]()


ROVs are also widely used in hydropower and utilities for dam and intake inspections, in civil infrastructure for bridge and tunnel assessments, and in marine research for seafloor mapping and environmental monitoring. Aquaculture operators use ROVs for net pen inspections and stock monitoring, improving efficiency and reducing manual dive requirements.
Underwater ROVs complement or replace traditional diving operations by offering safer, more efficient methods for inspections and maintenance. Infrastructure assessments, such as bridge pilings or water tanks, are frequently conducted using these tools.

Marine scientists and educational institutions leverage underwater drones to study ecosystems, monitor climate change impacts, and collect data in otherwise inaccessible areas. A research team can use a Deep Trekker underwater ROV to survey submerged archaeological sites, gathering detailed imagery without disturbing artifacts.
Fish farm managers utilize ROVs to inspect net pens, monitor fish health, and ensure compliance with environmental regulations. These tools minimize the need for manual dives, improving safety and efficiency. An aquaculture company can expect a 40% reduction in inspection costs after adopting Deep Trekker ROVs for routine monitoring.

Across these industries, ROVs provide consistent advantages: safe access to underwater environments, repeatable data collection, and reduced reliance on divers or large support vessels. As system capabilities continue to expand—particularly in high-current performance, deepwater operation, and real-time spatial mapping—the range of applications continues to grow.
The heart of any underwater ROV is its imaging and sensory systems, which enable precise navigation, detailed inspections, and effective data collection underwater. Ultra-high-definition 4K cameras capture sharp visuals, complemented by powerful LED lighting to ensure clarity in low-visibility environments. These features are essential for applications like pipeline inspections, aquaculture monitoring, and marine research.
Advanced systems now combine multiple sensing modalities into a unified perception stack. SPECTRA integrates stereo vision and sonar-based SLAM, enabling simultaneous visual inspection, spatial mapping, and navigation without reliance on external positioning systems. This improves performance in low visibility, confined environments, and acoustically complex areas.
To enhance functionality, ROVs can also be equipped with advanced sensors. Sonar systems provide critical data for mapping and object detection in murky waters, while USBL systems enable precise real-time positioning. IMUs stabilize the underwater ROV by measuring orientation and movement, and DVLs offer reliable velocity tracking relative to the seafloor or water column. Depth sensors further ensure operational safety by monitoring the ROV’s position underwater.
Together, these technologies empower operators with the tools needed for complex underwater missions.
Battery-powered ROVs provide unparalleled portability and runtime. The propulsion system determines speed, stability, and the ability to navigate currents. Deep Trekker’s ROVs feature lithium iron phosphate (LiFePO4) batteries for long-lasting performance and safety, making them ideal for inspections without tethering to optional topside power sources. These systems are also powered by six vectored thrusters, offering unmatched control, maneuverability, and station holding, even in strong currents or confined spaces.

High-current environments require not only thrust, but controlled thrust distribution. SPECTRA’s propulsion system is optimized for both peak output and low-speed modulation, enabling stable inspection of assets such as risers, hulls, and splash-zone structures without excessive drift.
Control systems are vital for adapting to different environments. Deep Trekker ROVs offer highly flexible control options, ensuring adaptability across diverse environments and applications. Operators can integrate custom configurations via the BRIDGE Box and choose between handheld controllers, intuitive tablet interfaces, control centers, and more. This versatile platform enables remote operation and advanced control, making it ideal for challenging scenarios such as offshore inspections, confined spaces, or hazardous areas.

Positioning systems are integral to effective underwater navigation. Deep Trekker ROVs utilize tools like Dead Reckoning, USBL (Ultra-Short Baseline), and ROV GPS to deliver precise location tracking, even in dynamic conditions. The Mission Planner feature further enhances autonomy, allowing operators to pre-program navigation routes for surveys or inspections. For example, a shipyard can deploy a GPS-enabled ROV to efficiently map submerged infrastructure, reducing operational time and eliminating the risks associated with manual diving.
These sophisticated control systems provide unmatched accuracy, efficiency, and ease of use, allowing professionals to undertake complex underwater missions with highly improved data acquisition.
Underwater ROVs are widely used in offshore oil and gas operations for inspection, repair, and maintenance (IRM) of subsea assets such as pipelines, risers, jackets, moorings, and FPSOs. These environments are defined by strong currents, limited visibility, and complex structures. ROVs enable close visual inspection, sonar-based assessment, and repeatable survey workflows without interrupting production.

With real-time 3D mapping from sonar SLAM, operators can verify inspection coverage during the mission and identify missed areas before demobilization. This is particularly valuable for large or geometrically complex assets, where maintaining spatial awareness is critical to ensuring complete and consistent data capture.
ROVs support a range of defense applications, including mine countermeasures (MCM), explosive ordnance disposal (EOD), port and harbor inspections, and pre-dive reconnaissance. These missions require precise maneuverability, stable positioning, and reliable performance in low-visibility or high-risk environments.
Integrated sonar and imaging systems allow operators to detect, classify, and assess underwater threats while maintaining a safe standoff distance. In port security applications, ROVs are used to inspect vessel hulls and underwater infrastructure for foreign objects or damage, improving response time and reducing reliance on dive teams.

In nuclear and energy facilities, ROVs are deployed to inspect submerged infrastructure such as intake structures, cooling systems, and spent fuel pools. These environments often involve confined spaces, contamination risks, and restricted access.
ROVs provide a controlled method for conducting detailed inspections while minimizing personnel exposure. High-resolution cameras, sonar imaging, and precise positioning systems allow operators to assess structural condition, identify debris or blockages, and support maintenance planning without requiring system shutdowns or dewatering.

Researchers deploy ROVs to study marine biodiversity, assess ecosystems, and monitor ocean health. Their non-invasive presence minimizes environmental disruption. For example, Laval University researchers used a Deep Trekker underwater ROV to map coral reefs, uncovering new insights into habitat conditions.

ROVs are also used in hydropower and civil infrastructure for dam, tunnel, and bridge inspections, as well as in aquaculture for net pen monitoring and maintenance. In each case, the ability to safely access submerged assets and collect consistent, high-quality data improves operational efficiency and reduces overall inspection costs.
Deep Trekker ROVs are designed with a range of innovative features to meet the demands of diverse underwater tasks. These capabilities set our systems apart, ensuring reliability, precision, and efficiency in challenging aquatic environments.
Our ROVs are compact and battery-powered, allowing for quick deployment and operation in remote or confined locations without requiring bulky surface support equipment.

Deep Trekker ROVs feature modular designs, enabling users to equip their systems with specialized tools for specific applications. One notable add-on is the sonar system, which offers clear imaging in low-visibility conditions, such as murky waters or dark environments.

In newer systems, modularity extends beyond add-ons to core architecture. SPECTRA’s design allows rapid replacement of mission-critical components, supporting high uptime in offshore and remote deployments where servicing delays directly impact project timelines.
Benefits of Sonar Add-On:

July 30th, 2021
Conoce todo sobre los pilotos de vehículos operados remotamente (ROVs): cómo...

April 3rd, 2026
Learn more about what sonar is and its many uses. Read...

December 23rd, 2021
ROVs and sonar can be used to inspect underwater structures such...

