Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
In the ever-evolving field of underwater exploration and inspection, accurate navigation is essential. Deep Trekker ROVs continually innovate and improve their capabilities in this area, equipped with cutting-edge sensors and systems that ensure accurate positioning even in the most challenging underwater environments.
This comprehensive guide explores the setup and application of Dead Reckoning with Deep Trekker ROVs, detailing the integration of various sensors and systems to ensure optimal performance. From understanding the basics of Dead Reckoning to implementing advanced navigation strategies, this guide provides all the necessary information to maximize the capabilities of Deep Trekker ROVs in underwater inspections and operations.
Whether you’re a seasoned professional or new to the field, you’ll find valuable insights into the latest in underwater navigation technology.
Discover the power of Dead Reckoning for underwater navigation. Learn about its historical use and the promise it holds for the future of marine operations.
Dead Reckoning allows for better positional awareness and data accuracy, improving safety and efficiency in maritime operations. This contributes to optimized routes, reduced fuel consumption, and cost savings, while also aligning with environmental sustainability objectives.
This type of tracking can be accomplished using purely on-vehicle sensors without the need for a USBL setup. This creates navigation opportunities in environments where a USBL is less effective, such as spaces with surface reflections, net interference, or shadowing.
Let’s take a look at how Dead Reckoning applies to Deep Trekker ROVs and underwater inspections:
Initial Position and Data: The process begins with the ROV's known initial position, which is usually obtained from GPS or other navigation systems before submerging. Additionally, data about the vehicle's velocity, heading, and other relevant parameters are collected.
Estimating New Position: Using this initial information, the underwater ROV can estimate its new position by integrating its velocity and heading information over time. Essentially, it tracks how far it has traveled in each direction (north, east, depth) based on its speed and direction of movement. The ROV's onboard software continually updates this estimated position as it moves.
Error Accumulation: Dead Reckoning is not perfect and can suffer from accumulated errors over time. Factors like water currents, turbulence, magnetic interference, and other environmental conditions can affect the ROV's actual path compared to its estimated path. These errors can accumulate, leading to a divergence between the estimated and actual positions.
Correction Methods: To mitigate error accumulation, Deep Trekker ROVs incorporate Sensor Fusion algorithms and technologies, utilizing sensors such as:
Inertial Measurement Unit (IMU): Measures and reports a vehicle's specific force, angular rate, and sometimes its magnetic field, typically used in navigation and orientation applications, and can help refine heading and altitude information.
Doppler Velocity Log (DVL): Utilized in underwater navigation systems to measure the velocity of a vehicle relative to the surrounding water by analyzing the Doppler shift in acoustic signals reflected off the seabed. This sensor measures the ROVs velocity relative to the water, helping to correct for drift caused by currents.
Sonar and Acoustic Systems: Sensor technologies that utilize sound waves, such as Sonar and USBL, to detect and interpret underwater objects, terrain features, and environmental conditions. These systems can be used for terrain mapping and localization. By comparing the acoustic signature of the environment with pre-existing maps, the ROV can correct its position estimate.
Deep Trekker ROV GPS: Although GPS is ineffective underwater, Deep Trekker’s ROV GPS provides real-time surface position updates when the underwater ROV surfaces. This allows for recalibration of position estimates by integrating with the Mission Planner, which correlates the surface position with known coordinates. By working alongside Dead Reckoning, the ROV GPS ensures precise correction of drift errors and improves accuracy during underwater missions.
Explore advanced underwater navigation tech with Deep Trekker ROVs. Learn about MEMS and FOG IMU, Dead Reckoning, and USBL integration for precise positioning.
Here's a breakdown of the necessary gear for successful navigation using Dead Reckoning with Deep Trekker ROVs:
Topside:
Underwater ROV:
Required sensors:
To start tracking underwater ROV position, first select a map mode through the hand controller. This will affect the map’s appearance along with what values are used to track position.
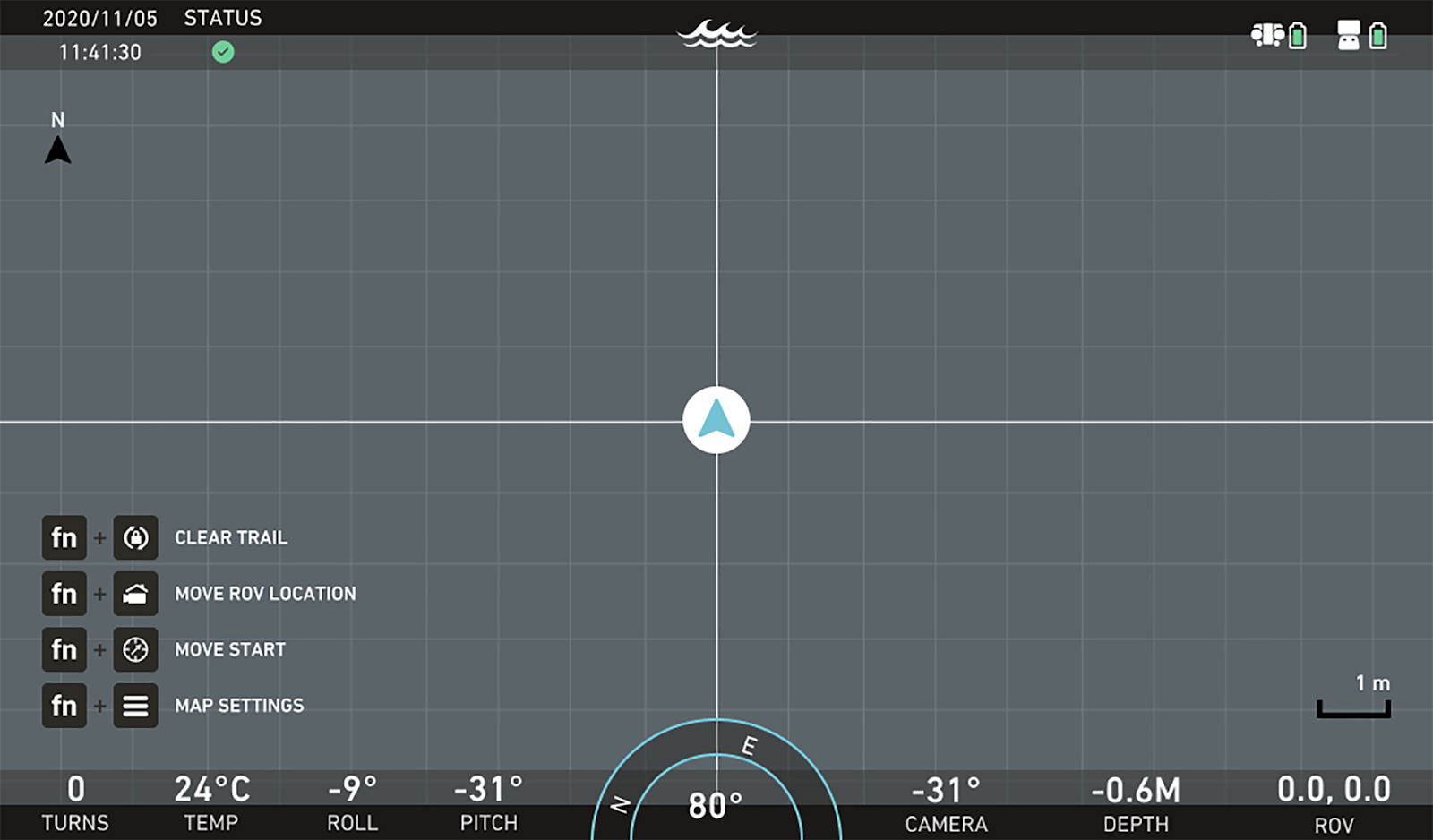
Local map: Uses a grid overlay with no map tiles. Tracks position through distance in meters from a starting point (0.0). This map can be useful when operating in indoor environments especially when the dimensions of the asset being inspected is known.
ROV: 5.8m, 2.0m
Global map: Uses real world map data and tracks position through latitude and longitude. This mode allows you to use different map styles such as street maps or satellite view.
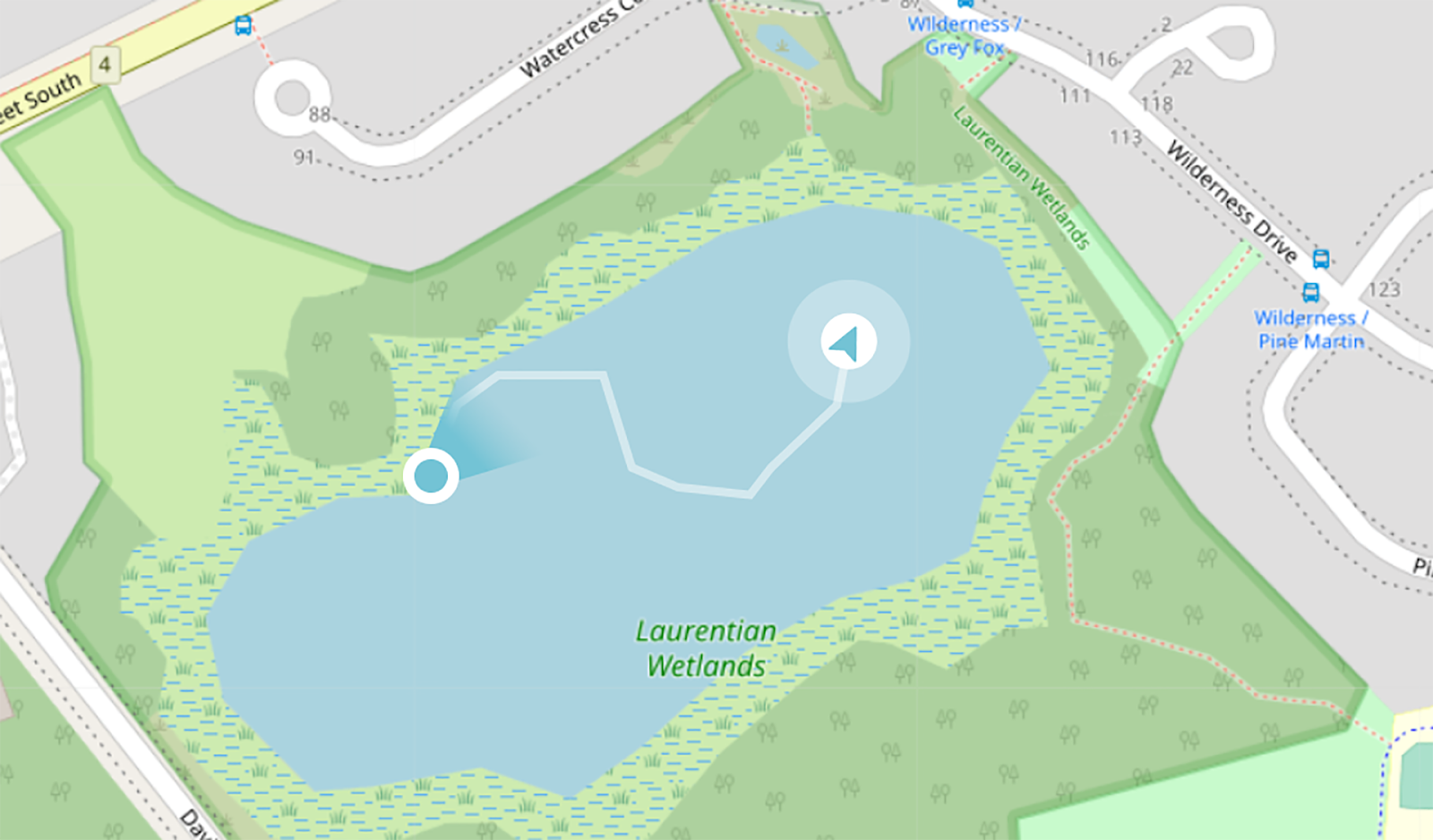
ROV: 43.4056949, -80.4676221
On first boot, the hand controller will prompt a selection between which map mode to operate in. Otherwise, the Local map mode can be toggled in the Maps settings page.
Initializing Underwater ROV Position: The last step before being able to track ROV position is giving the vehicle an initial position to track from. This can always be set manually through the controller, however it will also be set automatically depending on the map mode or if a USBL is in use (see diagram below).
If using the local map: On startup, ROV position will be set automatically to 0.0 meters. Afterwards manual initialization is required.
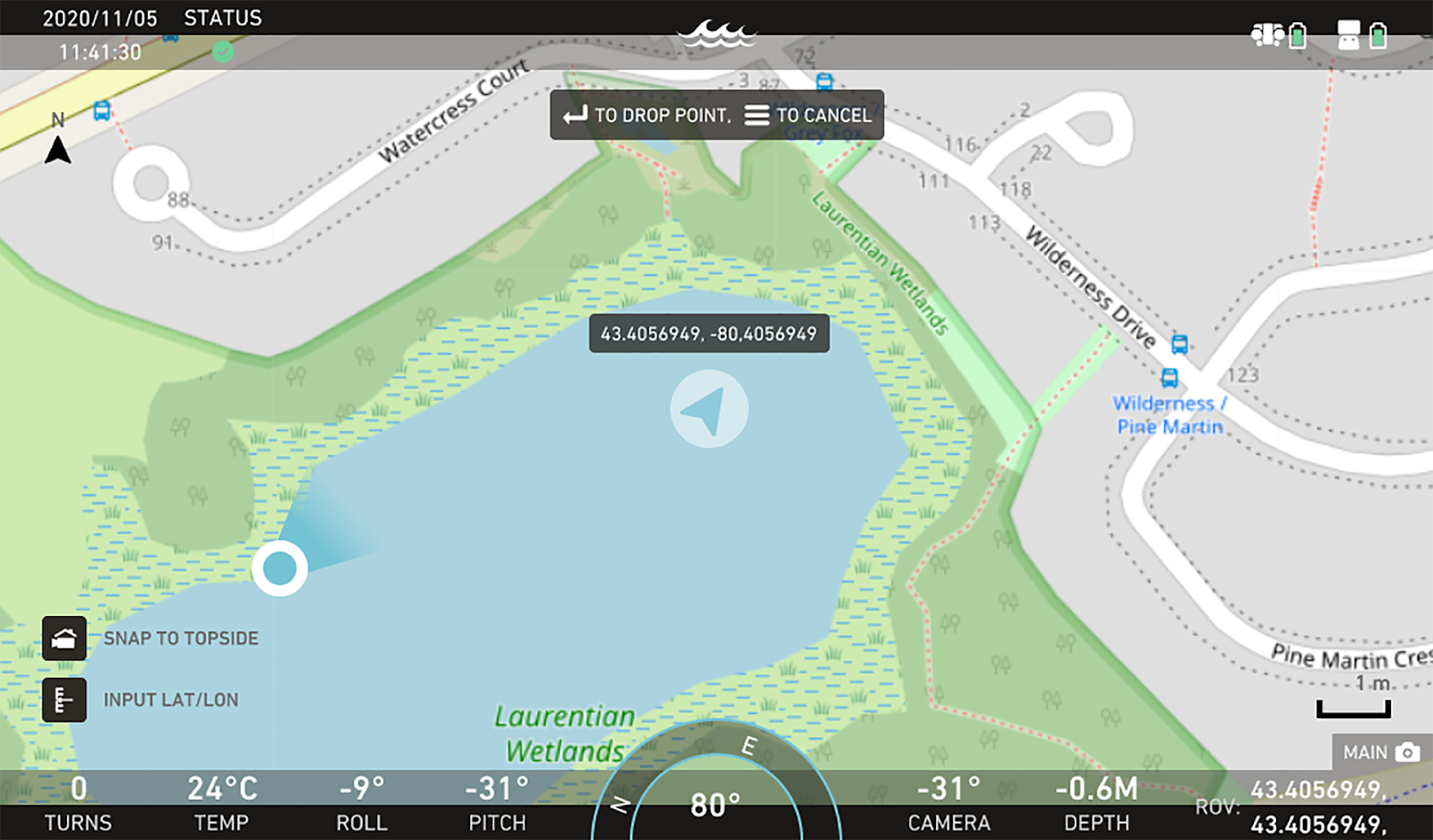
If using the global map: Manual initialization is required, however if a USBL is in use its pings will correct the ROV position automatically. A latitude and longitude can be entered as well through the keypad.
In either scenario, the ROV position can be manually initialized simply by pressing FN + Camera Home when the mini or full-screen map is open:
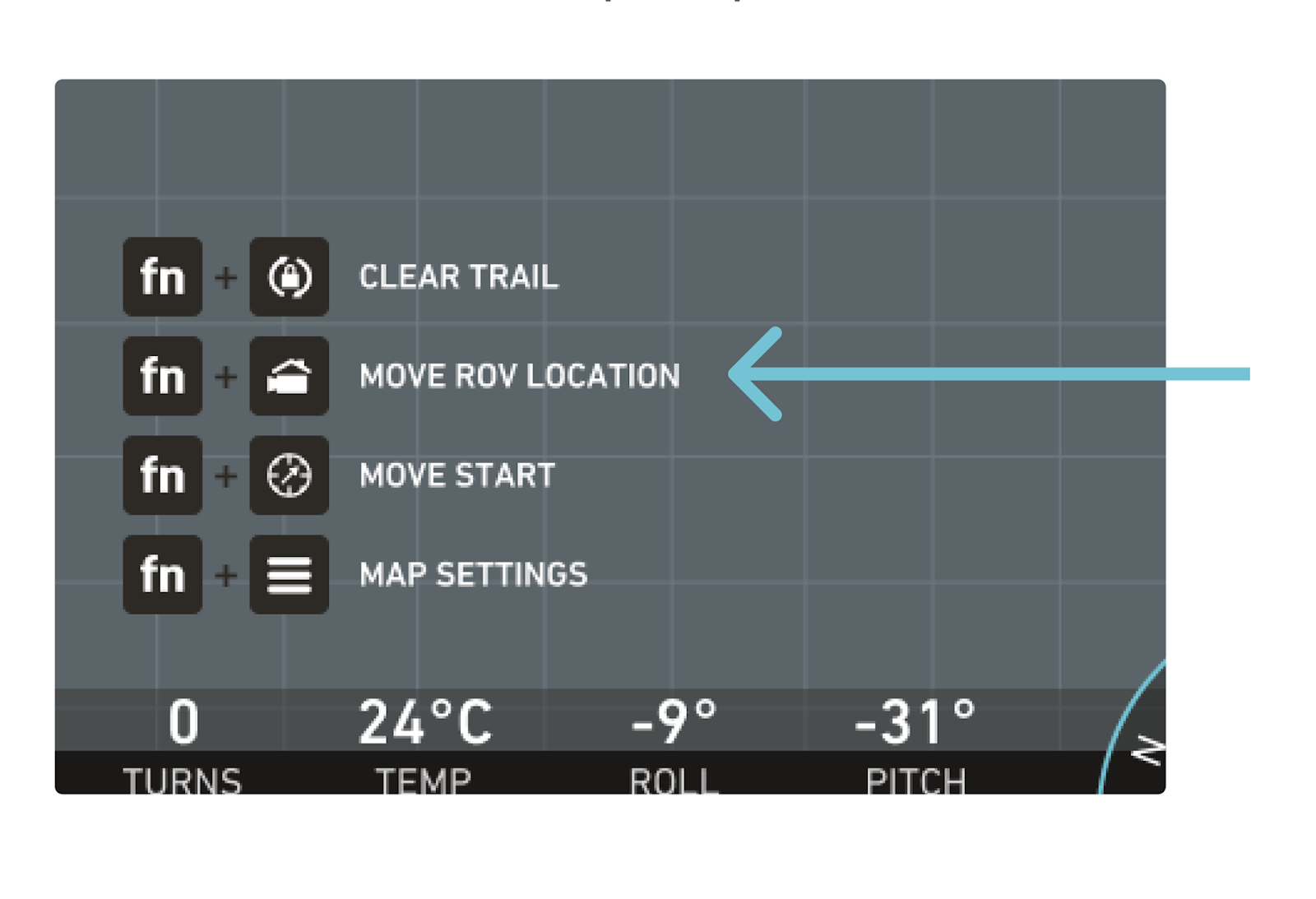
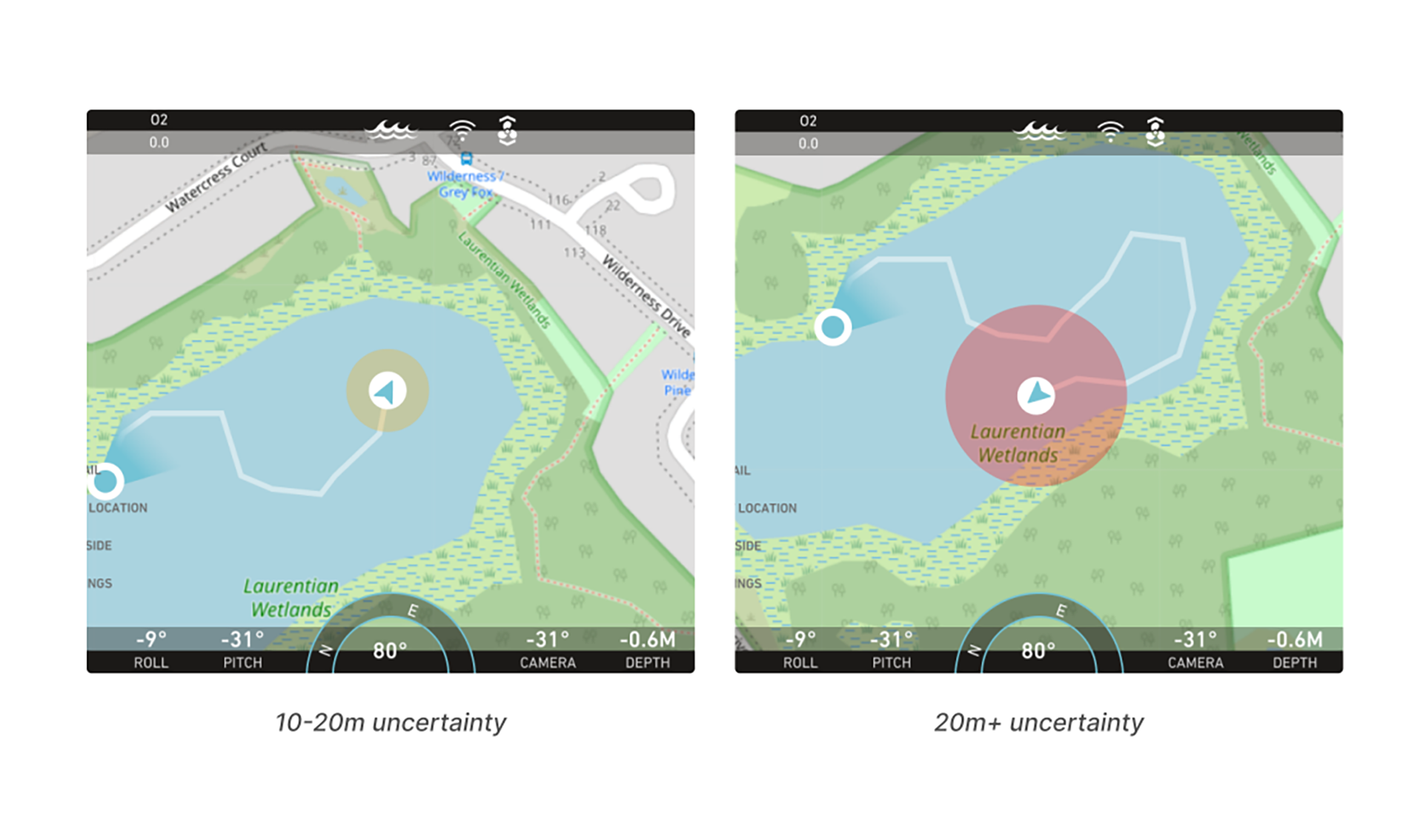
Position Uncertainty: When Dead Reckoning, the ROV’s position uncertainty will continue to grow as time passes. This is represented by the uncertainty bubble seen on the navigation map.
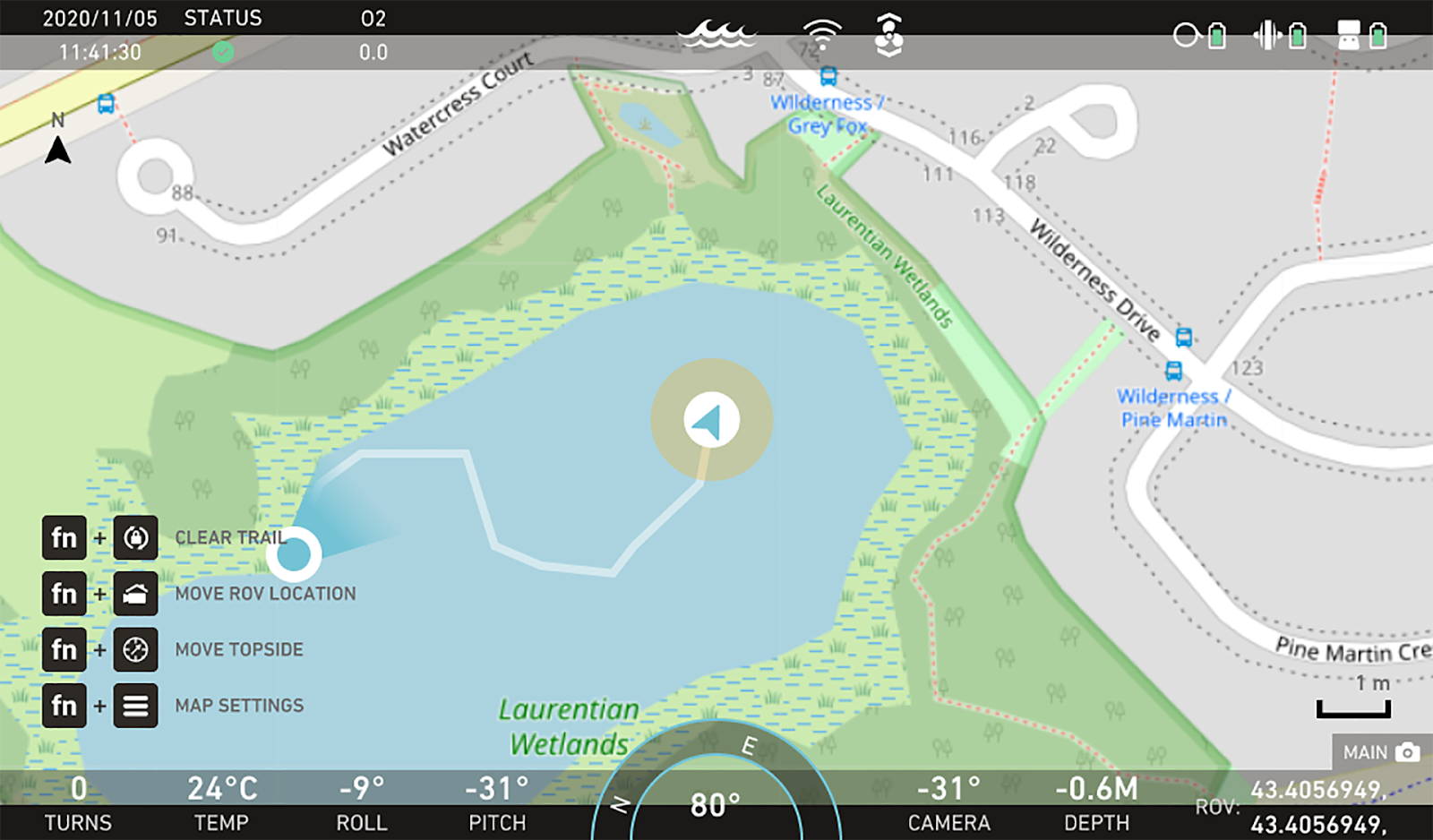
10-20m uncertainty
Typically you will get 30 minutes of operation before reaching an uncertainty of 10 meters.
If the position uncertainty grows too high, it’s recommended to re-initialize your ROV’s position when possible using any of the methods stated above.
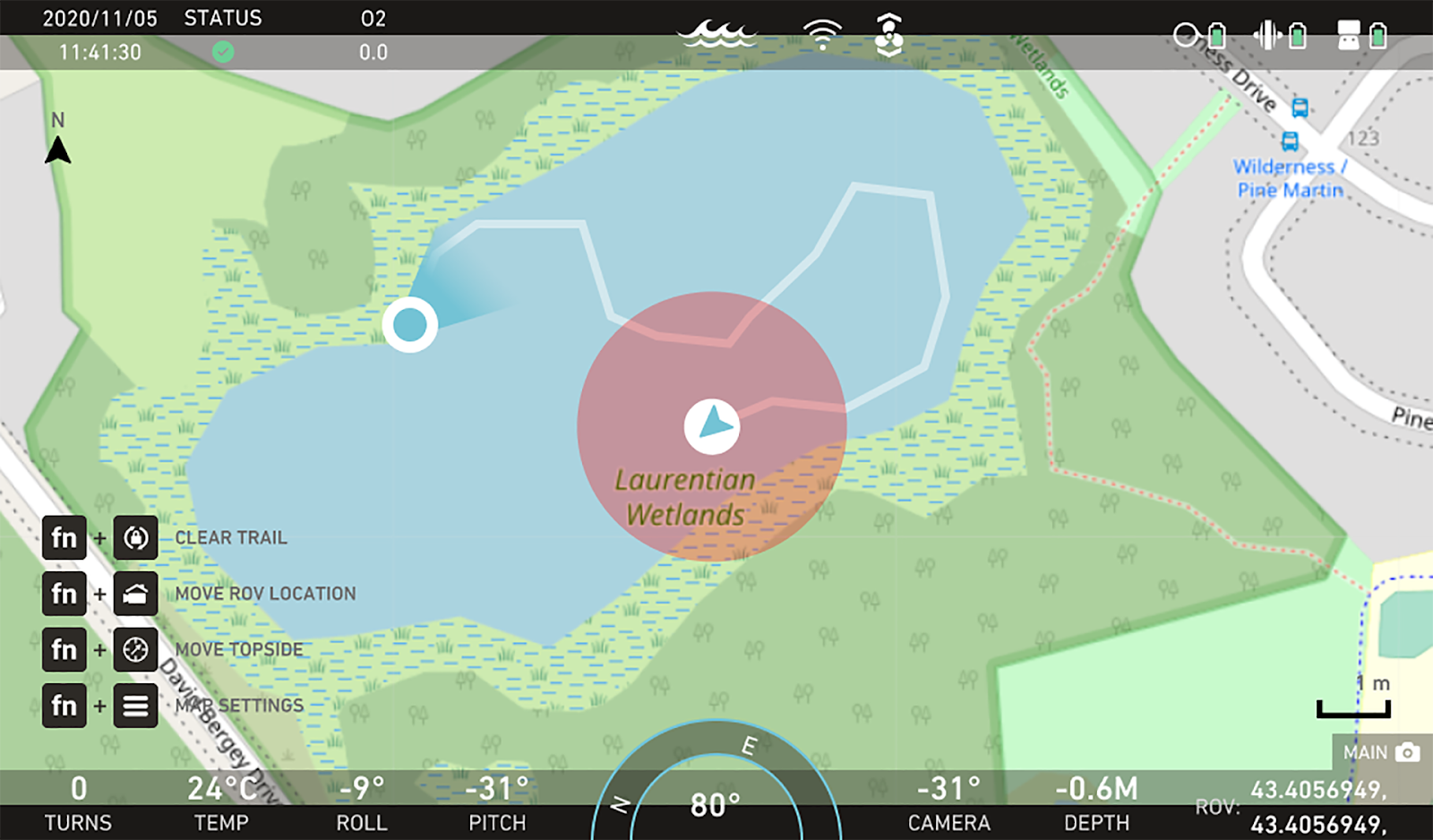
20m+ uncertainty
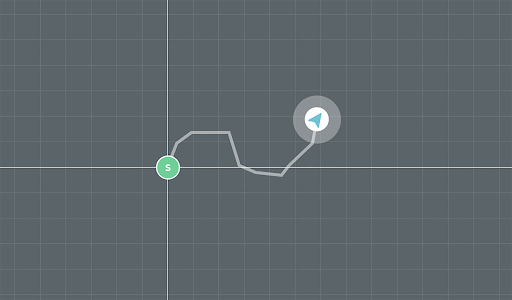
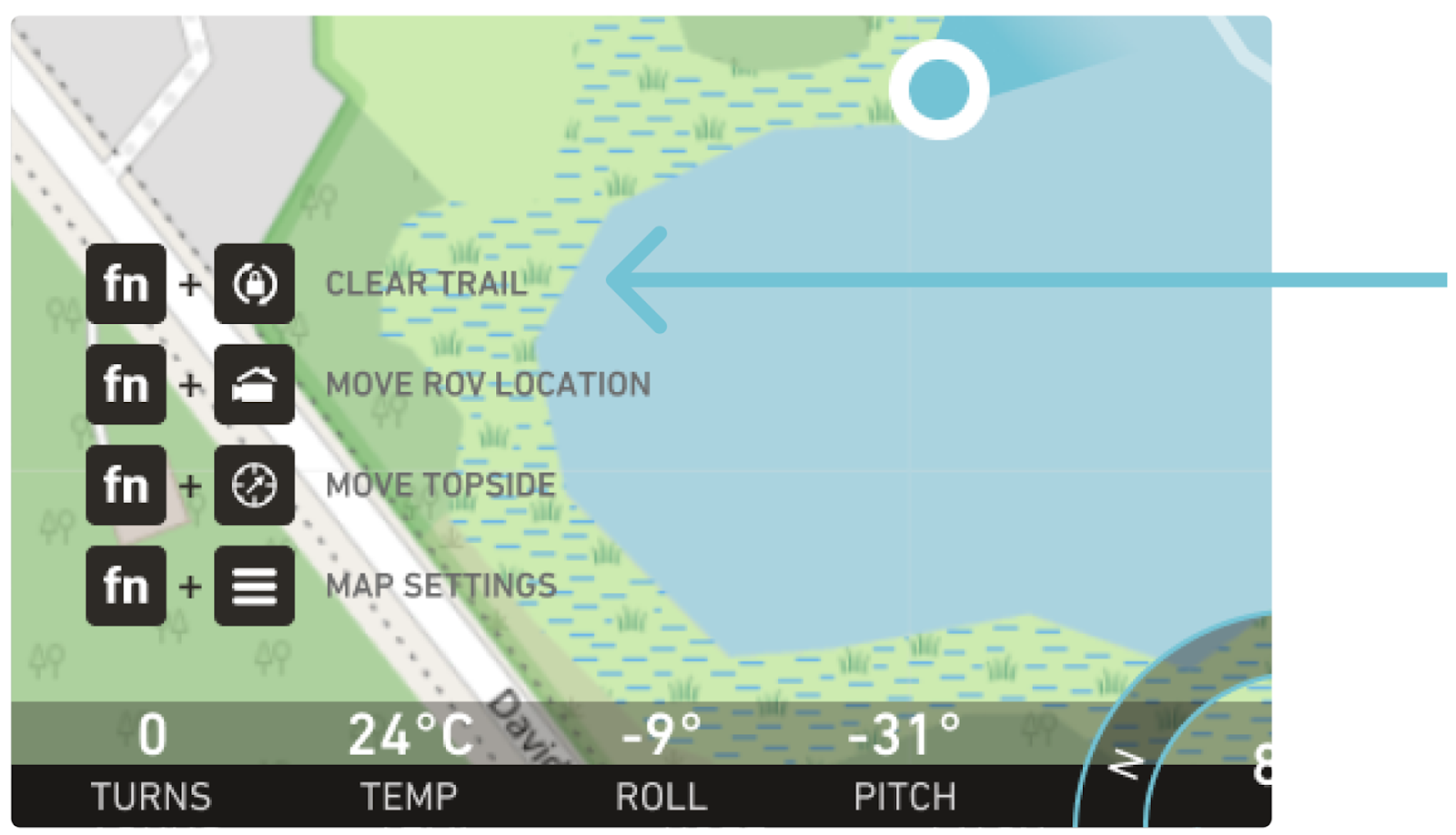
ROV Trail: Along with the other updates in Controller version 8, the ROV’s previous positions will be displayed on the map through a ghost trail. This will be drawn as long as there is an ROV position being provided (regardless of Data Logging).

The trail can also be cleared at any point by pressing FN + Pitch Lock or by pressing “Clear ROV trail” in the Maps settings page.
Deploy a ROV to perform quick, safe and affordable hull inspections
At the heart of Deep Trekker's innovation lies the ability to equip mini underwater ROVs with the capability to rapidly and accurately track their position during inspections. This development is a watershed moment for the maritime industry, as it promises to make routine inspections of vessels more accessible and efficient than ever before.
By facilitating precise positioning and navigation of mini ROVs beneath vessels, Deep Trekker's Dead Reckoning technology ensures that inspections are thorough, reliable, and yield comprehensive data. This, in turn, allows for the optimization of cleaning schedules, leading to improved fuel efficiency and substantial cost savings for vessel operators.
The ability to quickly and easily track the ROV's position enhances the early detection of defects through regular corrosion monitoring. By pinpointing the exact locations of notable defects, Deep Trekker's technology enables maritime professionals to address issues promptly, reducing the risk of costly repairs down the line.
Deep Trekker's Mission Planner feature is also incredibly powerful and beneficial, with the ability to track where the underwater ROV has gone and collect data from specific waypoints. It utilizes advanced algorithms for intelligent pathfinding for precise navigation as the ROV autonomously follows designated waypoints, optimizing efficiency and reducing operator workload.

Equipped with IMUs, DVL, and USBL sensors, Deep Trekker ROVs can interpret live positional data, enabling seamless autonomous navigation. Simply set waypoints by dragging and dropping or uploading preset coordinates, and watch as the ROV follows the designated path, recording data along the way.
Once calibrated and deployed, the underwater ROV can begin routing in seconds, ready to begin navigating between waypoints, with options to change speed and depth, while simultaneously recording data along the way.
Perhaps most notably, advancements in underwater camera technologies have made it increasingly cost-effective to deploy ROVs equipped with the capability to build 3D photogrammetric models of vessels and key components such as propellers, rudders, and sea chests. Deep Trekker's system promises to be an invaluable tool for precise measurements and assessments, thereby bolstering the overall accuracy of inspections.
Discover how to find the best footage for your photogrammetry projects to create 3D models of underwater assets and environments.
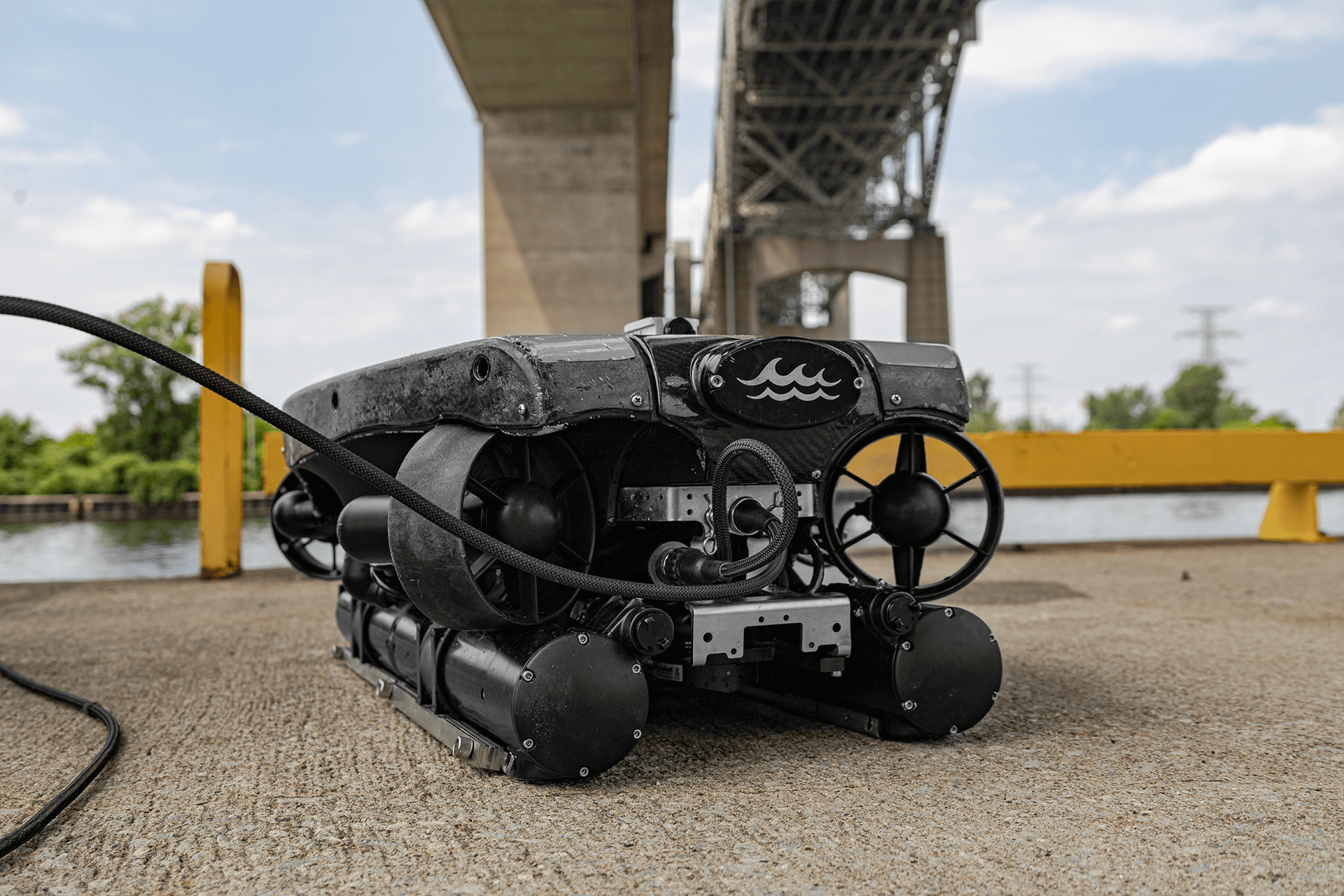
Deep Trekker ROVs, constructed with robust industrial-grade materials, are crafted for adaptability and long-lasting performance. They are ready for immediate deployment and come equipped with a wide range of advanced features. These ROVs are highly portable and easy to set up, offering powerful LED lighting, a live 4K video feed, up to a 360-degree field of view, imaging sonar, versatile sampling tools, and much more.
Our experienced team is available to provide expert guidance for a broad range of applications, including hull vessel inspections, water tank examinations, and underwater assessments across various industries. We deliver customized solutions that precisely meet your specific needs. When you're ready to secure your Deep Trekker underwater ROV, don't hesitate to get in touch with us for a personalized quote.

July 30th, 2021
Learn all about remotely operated vehicle pilots: how to become one,...

April 3rd, 2026
Learn more about what sonar is and its many uses. Read...

December 23rd, 2021
ROVs and sonar can be used to inspect underwater structures such...