Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
ROVs integrate a comprehensive suite of advanced sensors and methodologies, each playing a crucial role in ensuring reliable underwater navigation. Below is an overview of key sensors
Camera: Serving as the primary source of situational awareness, high-definition cameras provide operators with real-time video feeds. They facilitate easy maneuverability during inspections of underwater assets and structures, offering vital visual cues essential for navigation
 Inertial Measurement Unit (IMU): Incorporating a compass, gyroscope, and accelerometer, the IMU tracks the ROV's orientation and motion in three-dimensional space. This data is necessary for stabilizing the vehicle and executing careful maneuvers.
Inertial Measurement Unit (IMU): Incorporating a compass, gyroscope, and accelerometer, the IMU tracks the ROV's orientation and motion in three-dimensional space. This data is necessary for stabilizing the vehicle and executing careful maneuvers.
Pressure Sensor: Continuously measures the surrounding water pressure and converts it into depth units using known pressure-depth relationships. This provides real-time depth information to the ROV's control system, aiding in navigation and maintaining the desired depth for specific tasks. The sensor also records depth data for analysis and mission planning while offering feedback for autonomous depth control and mission execution.
Doppler Velocity Log (DVL): By measuring changes in sound wave frequencies, DVL systems determine the ROV's speed, direction, and altitude relative to the seabed. This information is vital for maintaining course accuracy and executing dynamic maneuvers.

Multibeam Imaging Sonar: Utilizing sound waves for real-time imaging, multibeam sonars offer detailed underwater visibility even in low or zero-visibility environments. They play a crucial role in navigation, object detection, and seabed mapping with exceptional resolution, serving as the primary visual aid when water clarity is compromised.
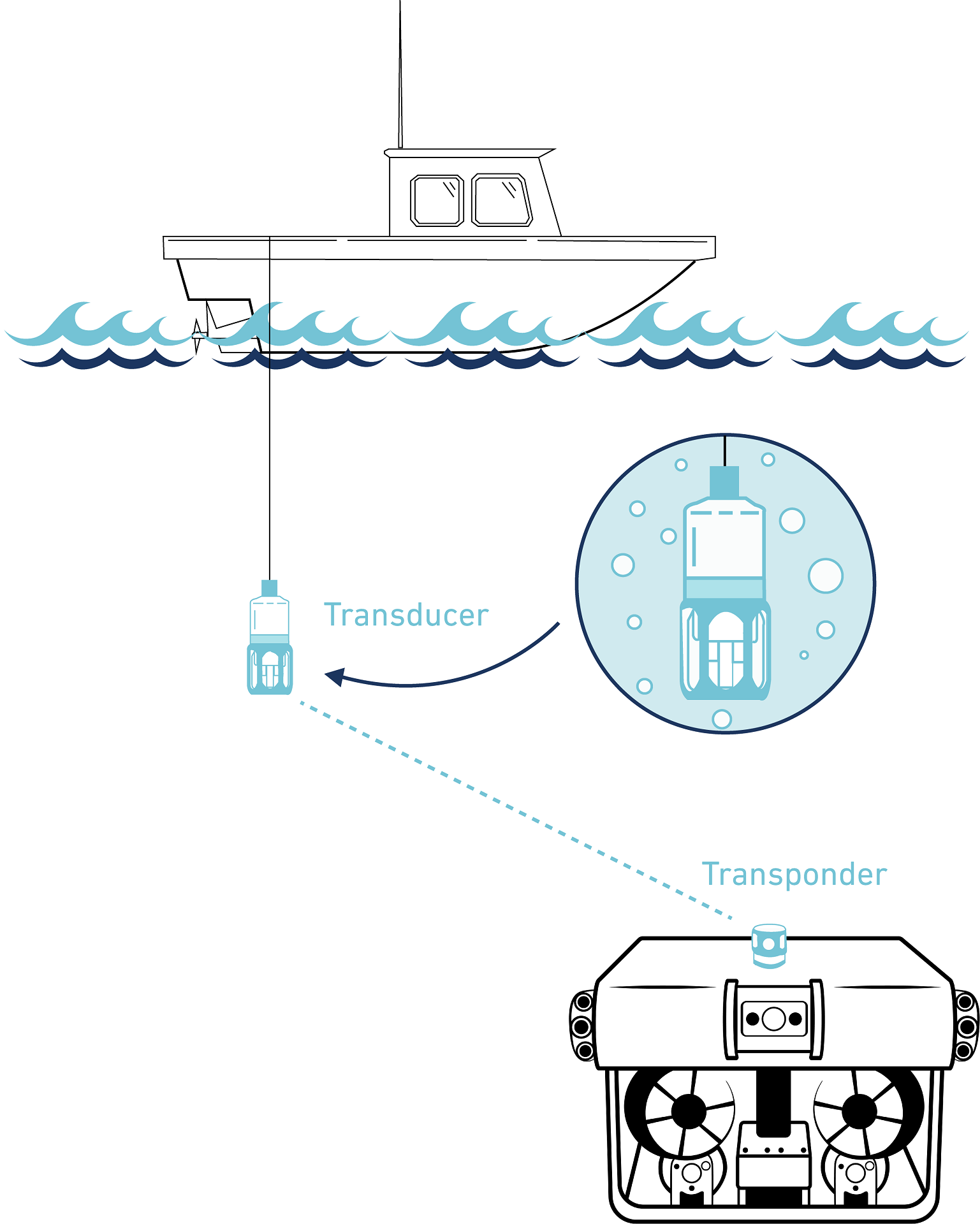
Ultra-Short Baseline (USBL): Integration with USBL enhances navigation accuracy and enables autonomous navigation and position holding in challenging underwater conditions.
Dead Reckoning: Dead Reckoning is a fundamental navigation method to estimate position based on previously known position, velocity, and heading information. By continuously integrating sensor data and accounting for external factors such as current drift, Dead Reckoning algorithms enable ROVs to maintain correct position estimates over extended mission durations.
The integration of USBL systems transforms underwater navigation, offering exceptional accuracy and reliability. By triangulating the ROV's position relative to surface transducers, USBL technology enables real-time mapping and localization underwater.
The seamless integration of USBL positioning enhances the capabilities of underwater ROVs, providing users with comprehensive navigation and mapping solutions tailored to diverse underwater applications.
Talk to us about how combining ROVs with divers can increase the efficiency of hydroelectric dam inspections
USBL triangulation quality is not as accurate compared to GPS triangulation quality; however, the overall quality of USBL is improved through sensor fusion.
IMUs are integral components of underwater navigation systems, providing crucial data on an ROV's orientation and motion.
Let’s take a look at both FOG and MEMS based IMU systems.
In the world of underwater navigation, the selection of the appropriate IMU technology plays a crucial role in ensuring accurate positioning and stable control of ROVs. Two prevalent IMU technologies, Microelectromechanical Systems (MEMS) and Fiber Optic Gyroscope (FOG), offer distinct advantages and trade-offs, each suited to specific applications and operational requirements.
MEMS IMUs are characterized by their compact size, low power consumption, and cost-effectiveness.
Leveraging microfabrication techniques, MEMS IMUs integrate miniature sensors, including accelerometers and gyroscopes, onto a single silicon chip. This miniaturization enables MEMS IMUs to be seamlessly integrated into compact underwater ROV designs, offering enhanced maneuverability and operational flexibility.

Furthermore, MEMS IMUs boast relatively lower production costs compared to their FOG counterparts, making them an attractive choice for budget-conscious projects and applications requiring mass deployment of underwater vehicles.
Despite their compact size and cost-effectiveness, MEMS IMUs deliver respectable performance in terms of accuracy and reliability, meeting the demands of many underwater navigation tasks.
One of the main drawbacks of MEMS is that they are less stable compared to FOG systems. MEMS systems usually rely on a compass to ensure heading stability. This fixes the heading stability issue while maintaining cost-effectiveness, however, this also means that MEMS systems tend to be susceptible to local magnetic distortions.
In contrast, FOG IMUs offer exceptional precision and stability, making them well-suited for demanding underwater navigation applications that require more finite accuracy and long-term reliability. FOG IMUs utilize the principles of interferometry, where light waves traveling through a coiled fiber optic loop experience changes in phase due to rotation, allowing for accurate measurement of angular velocity.
The inherent stability and accuracy of FOG IMUs make them ideal for tasks such as underwater mapping, seabed surveying, and pipeline inspection, where positioning and motion tracking are critical. However, FOG IMUs typically command higher production costs and exhibit larger physical footprints compared to MEMS counterparts.
In addition to their cost, it’s important to note that FOG IMUs also require a significant amount of time to boot up and calibrate (approximately 15 minutes). During this time, the vehicle must be completely flat and stationary on solid ground, which makes deployment off of a boat problematic.
When selecting between MEMS and FOG IMUs for underwater navigation, it is necessary to consider the specific requirements of the intended application, including accuracy, cost constraints, operational conditions, and deployment scale. For projects prioritizing compactness, cost-efficiency, and versatility, MEMS IMUs offer an attractive solution, providing great performance for a wide range of underwater tasks.
On the other hand, applications demanding uncompromising precision and long-term stability may favor the superior performance offered by FOG IMUs, despite their higher cost and larger form factor.
By carefully evaluating the trade-offs between performance, cost, and operational requirements, teams can make informed decisions when selecting the most suitable IMU technology for their underwater navigation needs.
While MEMS IMUs excel in compactness and cost-efficiency, FOG IMUs offer unmatched precision and stability, catering to the diverse needs of underwater inspections, research, and industrial applications.
By understanding the strengths and limitations of each IMU technology, stakeholders can make informed decisions to optimize the performance and efficiency of their underwater navigation solutions.
Dead Reckoning serves as a complementary method for underwater navigation, particularly in scenarios where external positioning systems may be unavailable or unreliable.
By continuously integrating IMU data with velocity and heading information, dead reckoning algorithms estimate the ROV's position based on its previous known location. Deep Trekker ROVs utilize Dead Reckoning techniques to maintain navigation accuracy in sub-sea GPS-denied environments.
Discover the power of Dead Reckoning for underwater navigation. Learn about its historical use and the promise it holds for the future of marine operations.
Talk to us about how combining ROVs with divers can increase the efficiency of hydroelectric dam inspections
 The synergy of IMU, DVL, and other sensors through sensor fusion techniques enhances the accuracy and reliability of underwater navigation. By intelligently integrating data streams and compensating for sensor inaccuracies, underwater ROVs achieve navigational precision and stability.
The synergy of IMU, DVL, and other sensors through sensor fusion techniques enhances the accuracy and reliability of underwater navigation. By intelligently integrating data streams and compensating for sensor inaccuracies, underwater ROVs achieve navigational precision and stability.
Sensor fusion algorithms optimize control responses, mitigate environmental disturbances, and enable autonomous operation, thereby streamlining underwater operations and inspection tasks.
Through continuous refinement and calibration, sensor fusion elevates the capabilities of Deep Trekker ROVs, ensuring seamless navigation even in dynamic underwater environments.
The classifications of positioning systems can be divided into three overarching tiers, each catering to specific requirements and budgets.
High-End Military Grade Solutions: "The high-end, military-grade solutions are typically FOG IMU-based, without the need for DVL integration, employing accelerometers and gyroscopes, albeit at a prohibitive cost," explains Nemanja Kliska, Deep Trekker Team Lead and Autonomy Systems Engineer.
These top-tier systems, typically priced between half a million to several million dollars, prioritize uncompromising accuracy and reliability. Utilizing FOG IMU-based technology, these systems, commonly found on military vessels and submarines, employ gyroscopes and accelerometers to achieve precise navigation without reliance on external sensors like DVL.
AC Spark Plug Titan Inertial Measurement Unit
High-End Civilian Systems: Positioned below military-grade solutions, high-end civilian systems offer advanced navigation capabilities at a relatively lower cost. Incorporating IMU or AHRS technology - comprising accelerometers, gyroscopes, and magnetometers - these systems ensure robust performance in various underwater environments. Moreover, some variants employ FOG systems to mitigate heading drift, enhancing positional accuracy.
MEMS-based Systems: Representing the next tier, MEMS-based systems provide a cost-effective alternative with acceptable performance metrics. Integrating MEMS gyroscopes and accelerometers, these systems offer satisfactory accuracy under optimal conditions. However, they rely heavily on compass or magnetometer data and require continuous calibration to mitigate errors and environmental interference, and require the incorporation of DVL systems.

July 3rd, 2026
Everything you need to become an ROV pilot: what the job...

April 3rd, 2026
Learn more about what sonar is and its many uses. Read...

December 23rd, 2021
ROVs and sonar can be used to inspect underwater structures such...