Configure Now
Articulos en tu carro de compras0
0Articulos en tu carro de compras
Comienza a creando su paqueteCompra Ahora



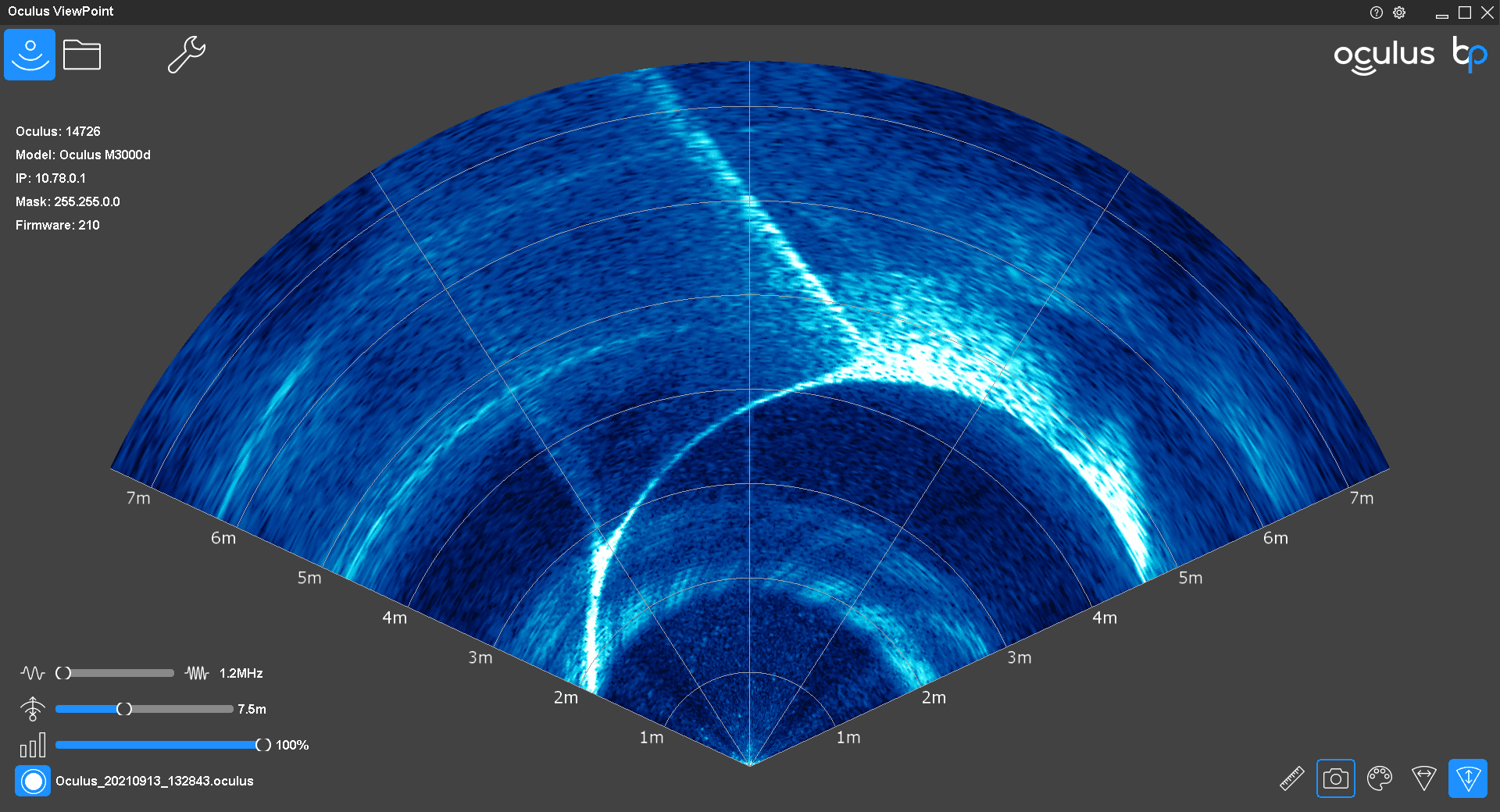
Equipe su ROV o vehículo robótico con el sonar de generación de imágenes multihaz M370s para localizar objetivos en aguas turbias a largas distancias. El M370 es el mejor para misiones de largo alcance y para navegación.
Error al agregar el artículo para cotizar
Se agregó a la cotización
Retención profundidad automática
Retención profundidad automática
Modo de doble frecuencia
Rango de 50m
Integrado en el controlador
Retención profundidad automática
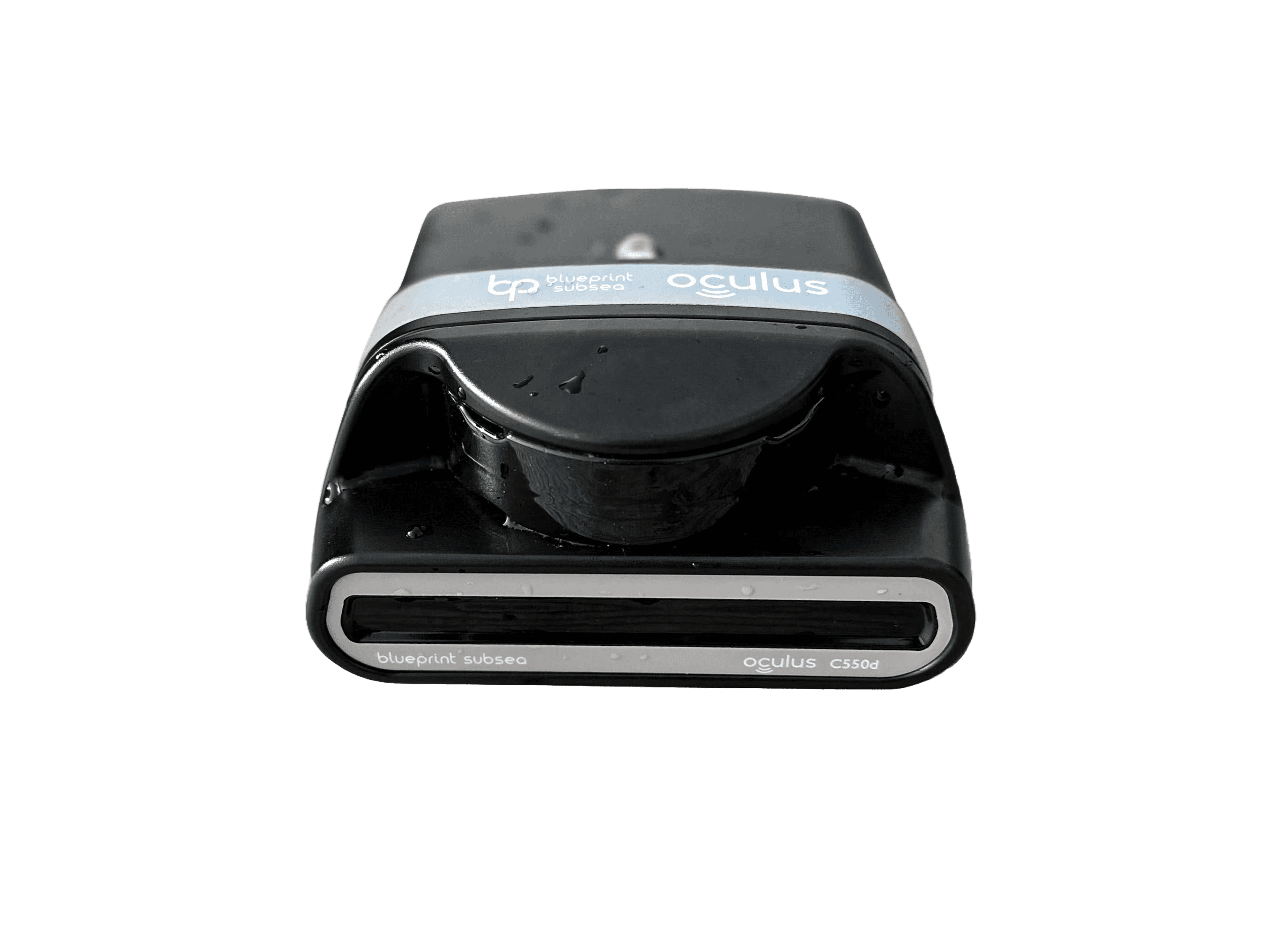
Accesorio de sonar de generación de imágenes multihaz de proyección Oculus M370S para las orugas robóticas y vehículos de operación remota de Deep Trekker.

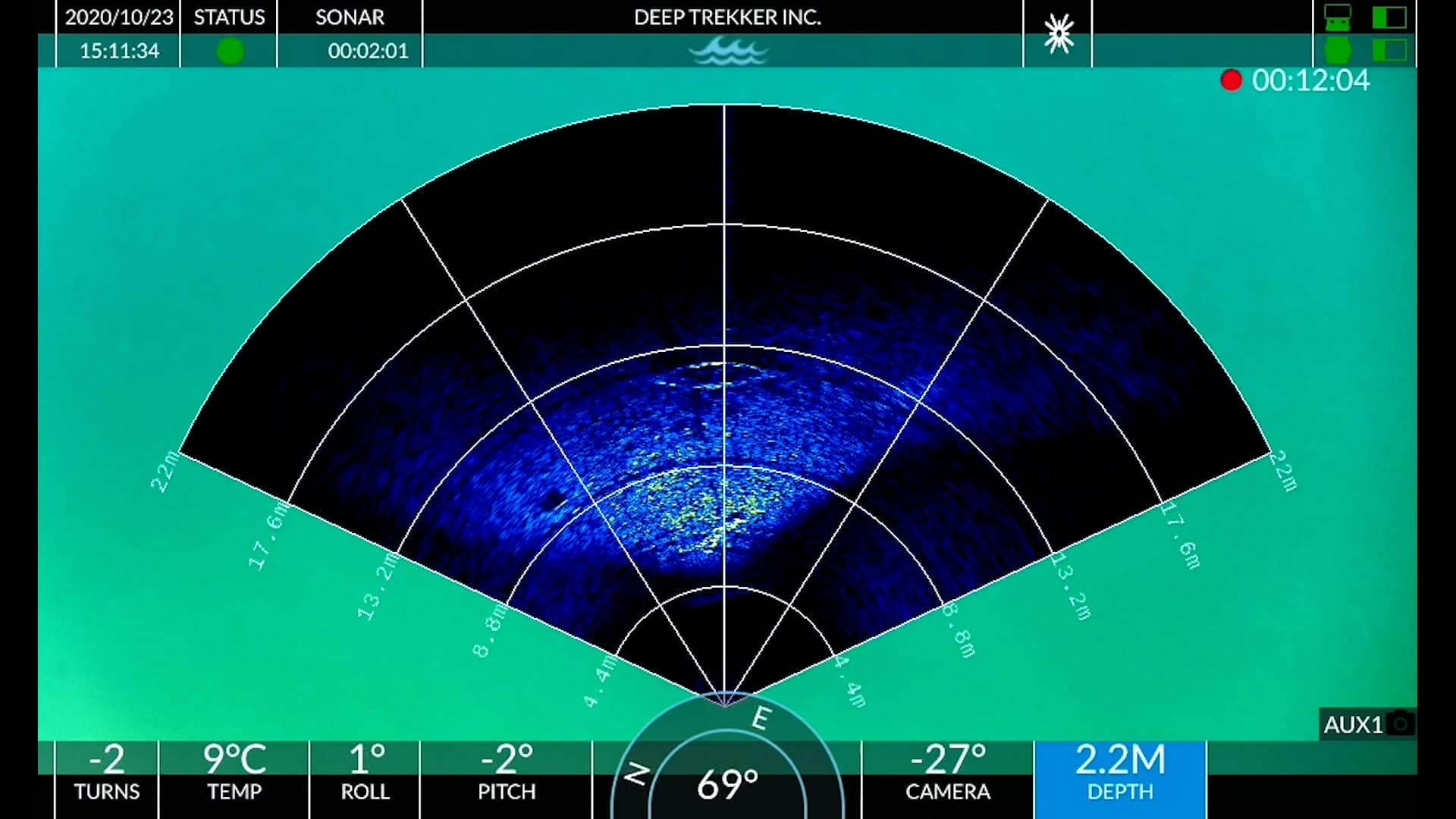
Las cámaras y los ojos de los buzos a menudo no son capaces de buscar efectivamente debido a la poca visibilidad bajo el agua. Un sonar de generación de imágenes es la mejor herramienta para luego volver a identificar el objetivo, ya que a veces los datos de los escaneos laterales no arrojan la ubicación exacta (por lo que navegar de regreso al objetivo potencial puede ser difícil). Una vez que el objetivo se ha vuelto a identificar, el sonar se puede utilizar para continuar con el seguimiento del objetivo a medida que se acerca y cuando ya esté lo suficientemente cerca, se puede utilizar para realizar la verificación visual.
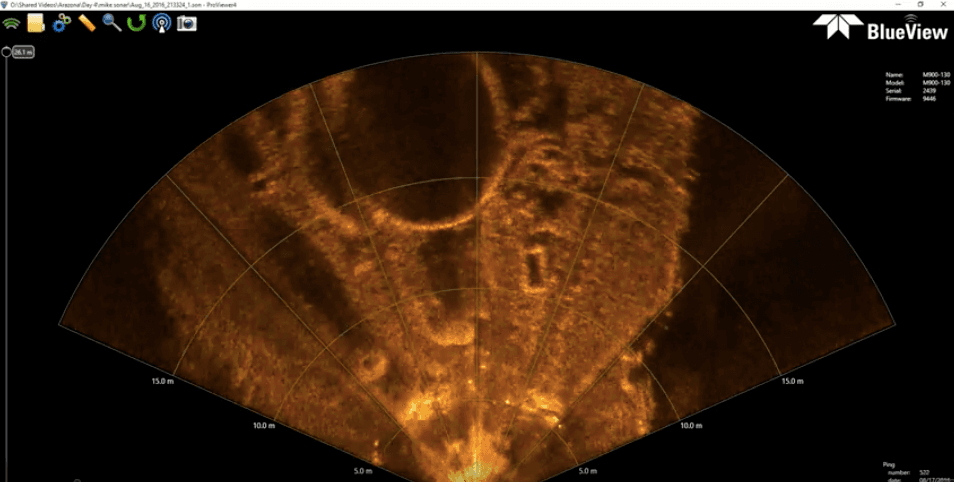
En operaciones de inspección, particularmente en aplicaciones de aguas turbias, puede ser difícil usar solo una cámara para comprender la condición de la estructura.
Por ejemplo, cuando se inspecciona el casco de un barco, se quiere ver si hay algún defecto o corrosión importante, daños en el revestimiento, zinc, ánodos, hélices, comprobar el estado del revestimiento, comprobar si el casco necesita limpieza
El C550d es compatible con una amplia gama de modelos de ROV, incluidos el DTG3, el PHOTON, el PIVOT y el REVOLUTION. Esta versatilidad garantiza que pueda mejorar las capacidades de su equipo actual sin complicaciones.

Empezar es muy fácil. La imagen del sonar se muestra directamente en su controlador portátil BRIDGE. Guarde y grabe su vídeo y un archivo de sonda independiente, todo en un solo lugar y en un solo dispositivo. Incorpore sin esfuerzo el sonar a sus operaciones ROV y embárquese en una nueva era de exploración submarina.
Los sonares de imagen tradicionales suelen tener un precio elevado. El C550d se ha diseñado para poner la tecnología de sonda avanzada al alcance de una gama más amplia de usuarios, sin comprometer drásticamente la calidad.

Usamos cookies para reunir información acerca de cómo interactúa con nuestro sitio web para mejorar y personalizar su experiencia. Consulte nuestra Política de privacidad para obtener más información acerca del uso de las cookies.


