Configure Now
Articulos en tu carro de compras0
0Articulos en tu carro de compras
Comienza a creando su paqueteCompra Ahora
🔗 NEW CASE STUDY: Using ROVs for Submerged Nuclear Asset Inspections at Dominion Energy



El sistema SeaTrac Ultra Short Baseline Locating le permite conocer mejor la posición relativa de su ROV y establecer puntos de referencia a lo largo de su inmersión. Entender dónde se ubica su ROV y dónde ya ha buscado o investigado puede ser difícil. Sin la habilidad de utilizar un GPS bajo el agua, el ROV recurre a tecnología de sonido para la navegación y la ubicación.
Error al agregar el artículo para cotizar
Se agregó a la cotización
Siga la posición del ROV bajo el agua
Integración en pantalla
Rango de 1 km
Sistema de posicionamiento Blueprint Ultra Short Base Line (USBL) SeaTrac Subsea integrado en Bridge para el seguimiento de los ROV.
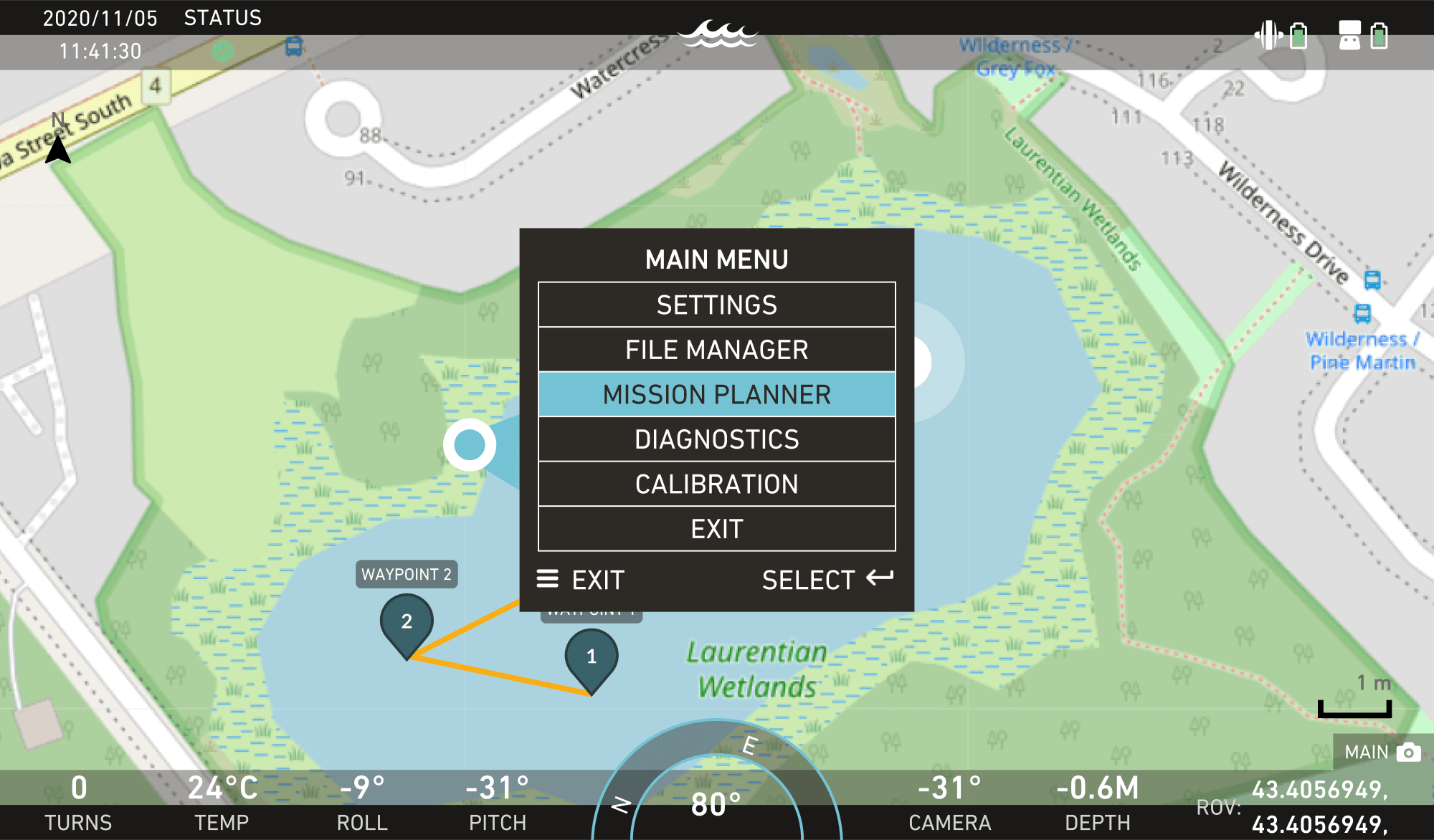
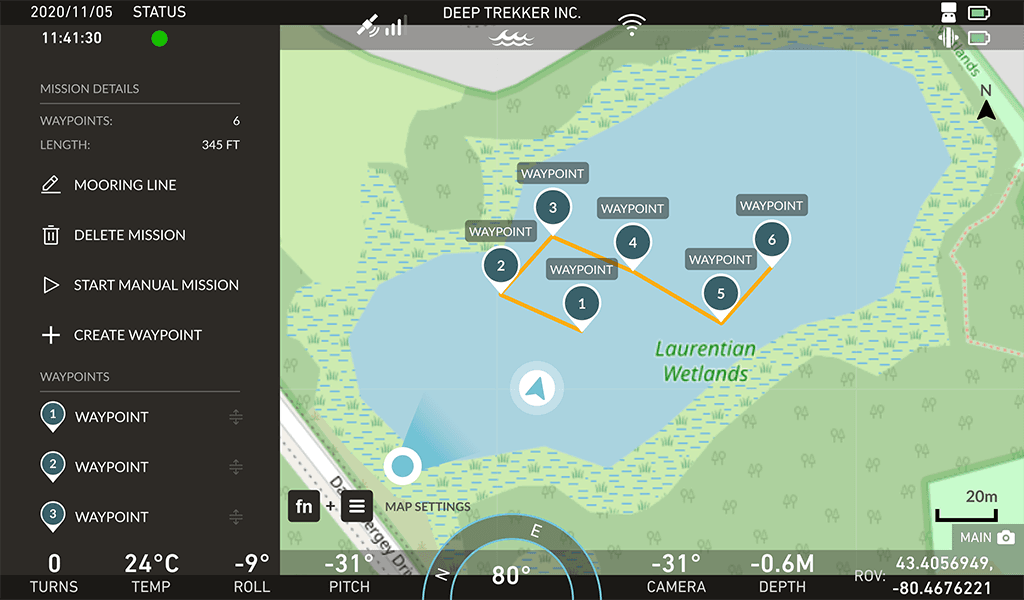
Con el planificador de misión de Deep Trekker puedes crear puntos de referencia en ubicaciones predefinidas o importar una hoja de cálculo y tener estos puntos de interés (PDI) mostrados en el mapa en todo momento.
La planificación de la misión también puede ayudarlo a realizar un seguimiento de los lugares a los que desea regresar. Simplemente crea un punto de referencia o suelta uno usando el botón del programa mientras pilotas para agregarlo al archivo de la misión.

Usamos cookies para reunir información acerca de cómo interactúa con nuestro sitio web para mejorar y personalizar su experiencia. Consulte nuestra Política de privacidad para obtener más información acerca del uso de las cookies.