Configure Now
Items in Your Cart0
0Items in Your Cart
Start building your packageShop Now
Marine science is the study of oceans and their ecosystems, focusing on everything from marine life to the physical properties of oceans. This field is essential for understanding climate change, biodiversity, and sustainable resource management. It provides critical insights that inform environmental protection and marine conservation efforts.
Explore how Marine Science benefits from ROV technology to improve environmental monitoring and enhance research efforts for more efficient and precise results.
One of the greatest challenges of working in marine science and underwater environments is navigation below the water's surface. Accurate underwater positioning is fundamental in marine science for mapping the ocean floor, monitoring marine life, and conducting research in challenging environments. However, tracking objects or vehicles underwater is complex due to the limitations of GPS signals, which do not penetrate water.
Underwater ROVs (Remotely Operated Vehicles) play a vital role in overcoming these challenges by utilizing advanced technologies that enable precise navigation and data collection in underwater environments.
These technologies include:
This article explores the importance of accurate positioning in marine science, covering methods like acoustic systems and inertial navigation. It will also detail why ROVs are ideal for underwater positioning, emphasizing their versatility and real-time data capabilities, and include a comprehensive case study on GreatPacific Consulting Ltd.'s experience with Deep Trekker ROVs for environmental monitoring and pipeline inspections, showcasing the practical benefits of these vehicles in the field.
GreatPacific Consulting Ltd. specializes in marine infrastructure, offering a full range of services including: engineering, environmental permitting, inspections, and environmental monitoring. Their application of Deep Trekker ROVs in inspections, habitat mapping, and sediment sampling showcases the versatility and precision these vehicles bring to challenging underwater environments.

Deep Trekker ROVs have proven effective in sediment sampling, particularly with mixed seabeds. One such project took place in Vancouver's industrial port, where traditional sediment collection methods were rendered ineffective due to the presence of riprap and debris.
Peter Howland, Director and Aquatic Scientist at GreatPacific, detailed the situation: “Initially, we tried collecting sediment using conventional methods, but rock and other debris prevented us from collecting suitable samples. That’s when we decided to use the sediment sampling attachment for the ROV, and we’ve been using it ever since. There’s just no way you could get that done in that debris field with conventional gear."

The sediment sampling attachment allowed the team to obtain accurate samples despite the challenging conditions. This method has become particularly useful in remote or industrial areas where access is limited, and conventional techniques are not viable. “The underwater ROV allows us to get a clear visual of the sampling area, providing video footage of what we're looking at and the sediment we've collected. You can direct the grab very accurately and get a good sample. We’ve applied this method in multiple locations, especially when conventional techniques like clamshell dredges aren’t feasible.”
The portability of the Deep Trekker ROVs, coupled with their ability to be deployed from small vessels, allows for operations in these remote environments, making them highly adaptable to various marine projects. "It’s small, it’s easy to carry around, and can be deployed from a small vessel without winches or davits," explained Howland.
“We’ve also used our Deep Trekker ROV in lakes, reservoirs, and other areas where there’s little current or limited access. Recently, we brought it to a remote coastal First Nations community to inspect their water intake. With no road access, the Deep Trekker is portable enough to carry into remote locations, which has been a huge advantage for us.”
GreatPacific also used Deep Trekker ROVs for pipeline inspections under extreme conditions, such as diagnosing issues with 2 kilometer long pipeline submerged beneath a meter of ice. This challenge involved determining the cause of flow disruptions, which were traced to air ingress upstream.
The ROVs ability to provide real-time, detailed visual feedback and location data utilizing USBL allowed the team to identify the scope of the problem. "We actually used the ROV to track down the air ingress on the line. We wouldn’t have spotted it without the visual confirmation," Howland confirmed.
After diagnosing the issue, the team implemented emergency repairs under the ice, and a final solution that included adding extra weight to the pipeline to prevent further displacement and airlocks, utilizing the ROV’s camera to monitor real-time corrections.
The ROVs ability to withstand cold temperatures and its ease of deployment from smaller platforms allowed GreatPacific to carry out these inspections safely and efficiently, ensuring the integrity of the pipeline while mitigating potential risks.
These pipeline projects depend heavily on both environmental and engineering aspects. It’s a balance between engineering requirements and environmental protection. Howland explains, “Our biologists handle the environmental permitting, including habitat mapping and cataloging the local fauna and flora. From there, the engineering team steps in to design the pipeline, apply for permits, and work with contractors and the client to build the system.
ROVs play a key role at several stages of the process. At the start, we use them to map pre-construction or pre-discharge conditions. If there's existing infrastructure, the ROV can capture video footage of what’s down there, whether it’s the seabed habitat or older structures, and pinpoint the location with sensors such as USBL.
“There are very few scenarios where we don’t use USBL, as it enables us to record precise locations, which is key when collecting environmental data. Many of these underwater pipelines, for example, have been in place for decades, and sometimes the location of a pipe is only known by a diver or contractor who worked on it years ago. It’s a huge advantage for engineers, see the infrastructure firsthand, and confirm that what was drawn on paper matches the reality underwater. Trusting verbal reports alone can be risky, so we rely on tools like USBL to get precise data. Sometimes, we’re able to locate infrastructure that people thought was lost for decades,” explains Howland.

For environmental assessments, ROVs have become indispensable for tasks like habitat mapping and pre-construction surveys.
"The ROV is also critical for gathering baseline water quality, sediment quality, and benthic data, which is part of the discharge permit requirements. For example, we might need to collect pre-discharge or post-discharge data to check for contaminants like metals or hydrocarbons, depending on the site.”
One example is a detailed habitat survey project GreatPacific worked on in Nanaimo, where a new outfall pipe had to be constructed through an eelgrass bed. The fisheries authorization required precise mapping of this bed before construction.
The ROVs provided high-resolution video feeds and 3D mapping data, allowing for precise pre-construction and post-construction evaluations. Howland emphasized, "The Deep Trekker’s ability to capture high-definition footage was vital for accurately mapping the eelgrass beds, a key requirement for our environmental permits."
Howland further explained, "The precision we got from the footage was extremely helpful for regulatory submissions, especially since eelgrass is a protected species. With the ROV, we were able to submit clear, irrefutable evidence of the habitat's condition both before and after construction."
The ROVs maneuverability and ability to access deep waters was also a critical factor, as Howland remarked, "It allowed us to access areas that would have been impossible to survey using traditional dive teams, saving us time and reducing operational risks."
The precision offered by the ROVs cameras and sensors such as sonar and USBL allowed the team to document sensitive habitats with minimal disturbance, collecting detailed visuals and samples that were essential for securing environmental permits and ensuring regulatory compliance.
“For us, when we’re conducting a habitat map, the most critical aspect is the map itself - knowing exactly where we are and where any environmental changes occur. The pinpoint accuracy provided by the USBL is extremely beneficial for this, and we’re able to mark key spots to come back in ffuture years for follow-up studies.” Howland explains.
This capability has been important in mitigating environmental impacts while allowing marine construction projects to progress. By offering both qualitative visual data and quantitative sample collection, the ROV provided a comprehensive platform for ecological monitoring, which helped the team stay compliant with regulatory frameworks.

Deep Trekker ROVs have greatly improved GreatPacific's operational efficiency, particularly in remote areas and on smaller vessels, reducing both costs and logistical complexity.
"Being able to deploy from a small boat cuts down on costs massively. In remote areas, this is a game-changer," says Howland. Their portability allows for easy integration into existing platforms, enabling tasks like water quality assessments, habitat surveys, and sediment sampling with minimal downtime.
The ROV is also critical where the required depths and bottom times exceed the no-decompression limits for divers. Howland recalls, “I remember one project, about eight years ago, where we swam 400-500 meters at a time to inspect a 4-kilometer-long pipeline. It was exhausting. But on the second inspection, we used the Deep Trekker ROV and, with a couple of battery changes, we were able to follow the pipe much more efficiently. For jobs that involve covering large distances, ROVs are definitely more practical."
The ROVs adaptability and precision make them essential tools for GreatPacific's detailed marine surveys and infrastructure assessments, even under strict budget constraints. As Howland puts it, "For our type of work, these ROVs are essential tools that we keep coming back to."
Accurate underwater positioning is essential for collecting meaningful data in marine science. While visual data, samples, and measurements are valuable on their own, the geographic context of where this information originates is critical. Understanding the precise location of collected data allows for more accurate analysis, as it provides spatial reference points and allows scientists to monitor environmental changes over time.
In many cases, marine scientists begin their work with a clear understanding of the coordinates they need to study. Underwater positioning allows them to return to specific sites, whether to assess an environmental intervention, track ecosystem changes, or observe phenomena over time.
For example:
Peter Howland, Director and Aquatic Scientist at GreatPacific explains how they have improved results for accurate mapping of locations,
“A key focus in assessing the effects of marine infrastructure or an effluent discharge, is identifying sensitive habitats such a eelgrass, kelp beds, or shellfish beds. Using ROVs with tracking systems, we can accurately and efficiently map underwater habitats. Previously, our surveys would rely on dive transects or third party data. This approach wasn’t always accurate. Now, we can more precisely pinpoint these locations and navigate the seafloor more effectively. Reducing uncertainty and cost to our clients.”

On other occasions, marine scientists may encounter something noteworthy during their fieldwork. The ability to accurately record the location of these findings is required for future research and ensuring the reliability of the data.
Examples include:
Howland highlights the importance of accurate location mapping, stating,
“In Canadian waters, construction near or within sensitive habitats such as eelgrass requires careful planning, compensation for impacts, and post construction monitoring. We need be to able to accurately pinpoint and map their locations. We use a combination of divers, side-scan sonar, and ROVs to achieve this. Before construction we map the extent and density of the eelgrass, defining the area that would potentially be impacted. The more accurately we define these areas, the better we can determine the scope of the impact and calculate the necessary compensation measures, like replanting eelgrass elsewhere. After replanting, we will monitor the area, and while the eelgrass is still filling back in, we can see gradual regrowth every year.”
Accurate underwater positioning is complex and faces unique challenges due to the inability of GPS signals to penetrate water. As a result, various methods have been developed to address these issues, each offering distinct advantages depending on the specific needs of marine research or industry applications.
Acoustic Systems (LBL,SBL,USBL) GPS and GNSS Inertial Navigation Systems (INS) Hybrid Tracking
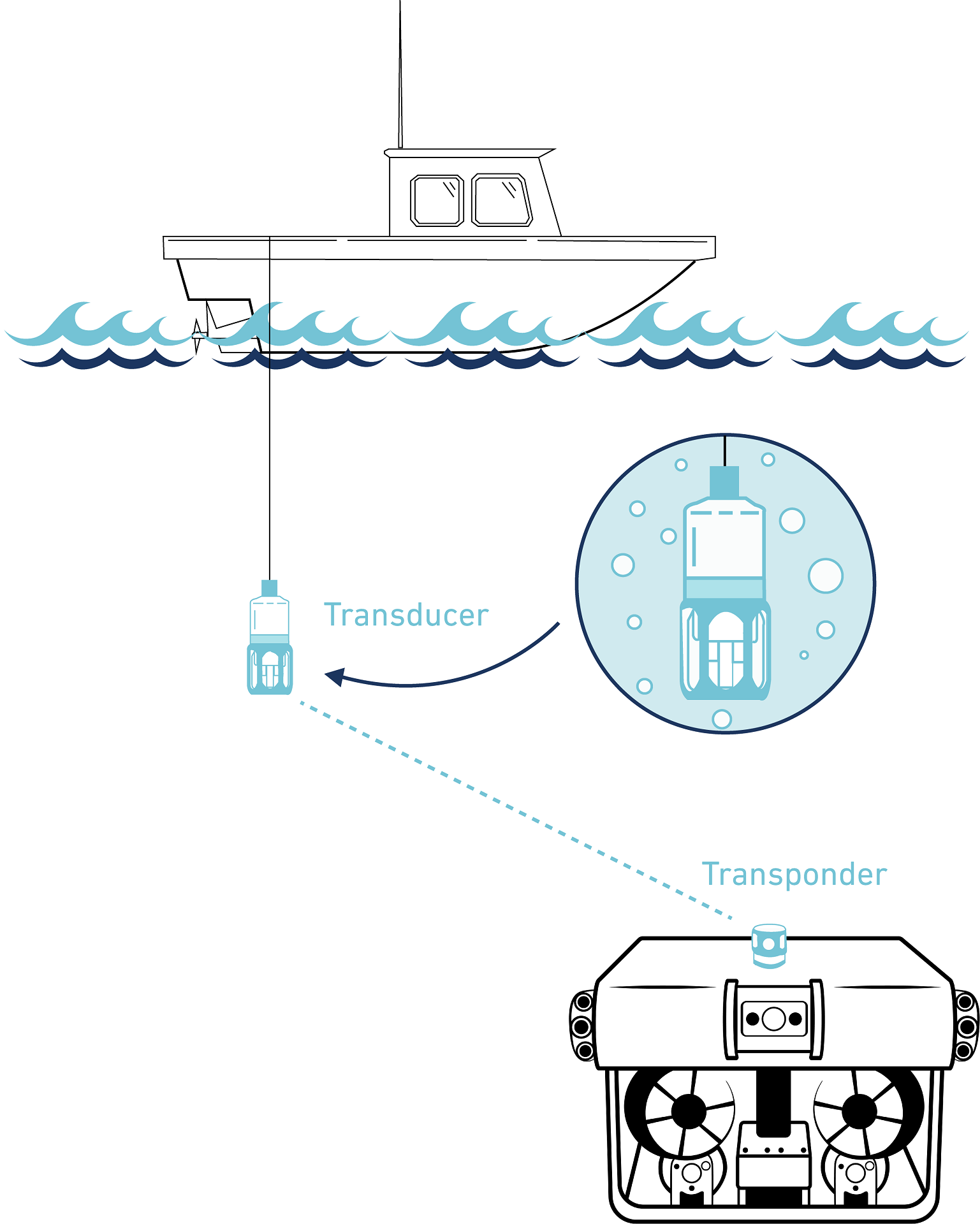
Acoustic Systems are commonly used, including Long Baseline (LBL), Short Baseline (SBL), and Ultra-Short Baseline (USBL) systems. LBL systems use seafloor transponders for high-accuracy positioning over long distances, ideal for deep-sea exploration. SBL systems, with transducers on vessels, are suited for shallower, shorter-range applications like harbor monitoring. USBL systems, using a single transducer on a surface vessel, are flexible and quick for underwater ROV and AUV navigation.
Howland explains,
“It's not uncommon for maps or underwater positions derived from a surface vessel to be inaccurate. Construction contractors, or old reports might say, 'the pipe is here,' but it’s always important for us to verify. It’s a huge advantage for engineers and other professionals to go down, see the infrastructure firsthand, and confirm that the reality underwater matches the intended design on paper. Trusting verbal, or unverified reports alone can be risky, so we rely on tools like ROVs and USBL to get precise data.”
GPS and GNSS provide positioning on or near the Earth's surface, with GNSS offering enhanced coverage through multiple satellite systems like GLONASS and Galileo. These systems are vital for maritime navigation and geospatial data collection.
Inertial Navigation Systems (INS) use a combination of accelerometers and gyroscopes to track an object’s movement based on changes in velocity and direction. These systems do not require external signals, making them highly effective in environments where acoustic or GPS signals are unreliable or unavailable.
Explore advanced underwater navigation tech with Deep Trekker ROVs. Learn about MEMS and FOG IMU, Dead Reckoning, and USBL integration for precise positioning.
No single underwater positioning method is flawless, which is why many hybrid systems combine different technologies to achieve higher accuracy. By integrating various systems, researchers and operators can benefit from the strengths of each method, compensating for the limitations of others.
Hybrid tracking systems combine various underwater positioning technologies to enhance accuracy by leveraging the strengths of each method. For instance, GPS-Acoustic/INS systems use GPS data from surface buoys alongside underwater acoustic signals or INS for continuous tracking above and below water. Similarly, hybrid acoustic and INS systems merge the periodic updates of acoustic tracking with the continuous motion monitoring of INS, improving overall accuracy and reliability in complex or extended navigation scenarios.
Underwater ROVs are a highly effective solution for underwater positioning, offering versatility, precision, and the ability to operate in challenging environments where human access is limited or unsafe. They are equipped with advanced technology to navigate complex underwater terrain, making them invaluable tools in marine science for both data collection and precise location tracking.
USBL Systems: Deep Trekker ROVs can be equipped with USBL (Ultra-Short Baseline) technology, which is critical for real-time, accurate location tracking. This technology enables precise navigation even at significant depths, making it ideal for detailed mapping, environmental monitoring, and biological studies that require real-time positioning updates.Dead Reckoning: In situations where acoustic systems may not provide continuous data, such as in confined environments or when signal disruptions occur, Deep Trekker ROVs utilize dead reckoning to estimate their position. By calculating movement based on speed, heading, and the time elapsed since the last known location, dead reckoning allows the underwater ROV to maintain positional awareness even when direct tracking is momentarily unavailable. This method is particularly useful for pipeline inspections, vessel inspections, or confined space navigation.
Discover how Deep Trekker's ROV technology transforms underwater navigation, overcoming traditional challenges in underwater positioning.

By combining these positioning methods, Deep Trekker ROVs offer unparalleled accuracy and flexibility, making them ideal tools for marine scientists conducting complex underwater research in dynamic and varied environments.
ROVs can be equipped with ultra high-definition cameras for detailed visual inspections, multibeam sonar imaging systems for mapping underwater environments, and sensors capable of capturing water quality measurements such as temperature, pH, and dissolved oxygen levels. ROVs can also be outfitted with tools for collecting water and sediment samples, allowing scientists to gather both biological and chemical data. The ability to combine these data collection methods with precise positioning information significantly enhances the value of the gathered data.
Deep Trekker ROVs are built for exceptional durability, using anodized aluminum, stainless steel, and carbon fiber to withstand harsh underwater conditions. Their robust design features magnetically coupled drives that reduce maintenance needs, contributing to an extended lifespan and cost-effectiveness by minimizing operational and maintenance expenses.
Underwater ROVs provide the capability to gather and assess positioning data in real-time, which is critical for optimizing mission outcomes. With real-time data transmission, teams can continuously monitor the ROV's location and status as it operates underwater. This immediate feedback allows operators to make informed decisions and adjustments during the mission, improving the effectiveness of data collection and navigation.

Deep Trekker ROVs are designed with user-friendly interfaces and intuitive controls, making them straightforward to set up and operate. The simplicity of the system allows for rapid deployment within minutes by a single person. This ease of use contrasts sharply with more complex positioning systems that may require extensive training and setup time.
Marine science depends on accurate data collection, and underwater positioning is necessary for tasks like ocean floor mapping, monitoring marine life, and tracking environmental changes.
Reliable underwater positioning enables precise data collection and long-term monitoring of environmental changes, allowing scientists to revisit specific locations. It also enables the mapping of new data points, such as sightings of rare species or environmental hazards like ghost fishing gear.
Deep Trekker ROVs offer a versatile and durable solution for marine research, equipped with technologies such as Dead Reckoning, USBL, and ROV GPS. They provide real-time data, flexibility in data collection, and cost-effective, reliable performance in harsh underwater environments.
This combination of advanced positioning methods and underwater ROV capabilities enhances the ability of marine scientists to conduct precise, efficient, and effective research in challenging underwater environments. With customizable packages to fit specific research or operational needs, Deep Trekker is ready to assist you in achieving your underwater objectives.

July 30th, 2021
Learn all about remotely operated vehicle pilots: how to become one,...
August 2nd, 2024
Discover how Deep Trekker’s enhanced 4K camera overcomes traditional challenges involved...

April 3rd, 2026
Learn more about what sonar is and its many uses. Read...